摘 要:为满足 光纤 传感地震加速度计对实时性、高精度以及网络化的要求,提出了基于ARM 和DSP双核微处理器的嵌入式系统设计方案.对3x3耦合器输出的相位已调加速度信号进行解调、频谱分析,并提供了以太网传输控制接口.文中介绍了信号解调原理.给出了关键电路的具体设计及其输出信号的数字信号处理的软硬件实现方法.实验结果表明。该系统在处理精度和实时性方面都能达到要求。性价比高,有一定实用价值.
光纤加速度计是一种光一机一电技术一体化的新型惯性系统,与传统加速度计相比具有抗干扰能力强、灵敏度高、动态范围大等优点.干涉型光纤传感地震加速度信号的检测和处理在能源勘探、桥梁建设、汽车碰撞试验、爆破作业、航空航天等领域有重要的应用.目前出现的检{贝 处理系统从解调技术上主要选用下列技术来提取被测物理且:(1)扫描激光光源的波长;(2)将干涉仪的一个臂绕在PZT上;(3)用移频器(如声光调制器)实现外差;(4)采用3x3或4x4耦合器使其输出正交或互成120。相位.相对于前3种技术,采用3x3耦合器来使干涉仪的输出成120o的解调技术精度高.动态范围宽.更可靠稳定.传统的加速度解调采用模拟电路完成.能实时处理信号,但所需电路繁杂,且模拟运算的误差较大;采用FPGA进行解调编程灵活,也是硬件实现,但不能进行小数运算,解调精度受到限制且成本较高.因此,本文提出ARM+DSP的双CPU设计方案,这一方面发挥DSP的快速信号处理能力,且能进行小数运算,提高运算精度,完成地震加速度已调信号的解调和频谱分析;另一方面充分利用ARM丰富的片上系统资源,能实现解调信号及其频谱信息的网络传输和显示,该方案仅通过改变软件无需重构电路就能方便快捷地实现系统升级.
1 系统构成及工作原理
地震加速度计由传感探头、光电转换及信号处理系统构成.传感探头由采用基于3x3耦合的光纤M—z干涉仪和相关机械部分组成.如图1所示,干涉仪的输入端是一只2x2耦合器,输出端是一只3x3耦合器,被测信号加在干涉仪的传感臂上.
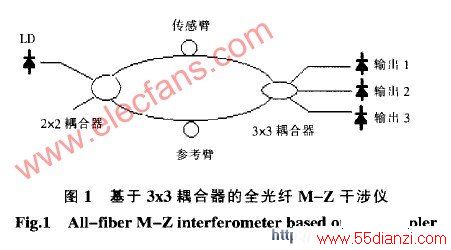
干涉仪的两臂光纤分别缠绕在传感头中的上下两个力臂圆筒上,当外部施加振动时,简谐振子施加给信号臂光纤一个纵向的应力,光纤的长度产生变化±△L (应变效应)、光纤芯的直径d产生变化±△d(泊松效应)、纤芯折射率n产生变化±△n(光弹效应),这些变化将导致光纤中光波的相位发生变化.泊松效应相对应变效应和光弹效应造成的相位变化非常小,可以忽略不计,从而即完成加速度信号对光信号的相位调制.参考臂和信号臂在3x3耦合器内发生十涉,将相位变化转换成光强变化,输出的光强信号经PIN转换为电流信号,输出给信号处理系统,能进行地震加速度信号的解调、频谱分析显示及网络传输控制等.
2 信号解调原理
对传感系统中的简谐振子进行分析可以得出,光波相位变化 Φ(t)与简谐振子感受的加速度a(t)有如
下关系。

式中,E为光纤的杨氏模量;A为光纤的横截面积;为弹簧片刚度系数:为有效光纤长度;m为简谐振子质量.从(1)式可以看出被测加速度与光相位变化呈线性关系.
在3x3耦合对称情况下,从干涉仪输出的3路电流信号,经I,v变换电路和放大电路后的输出为:
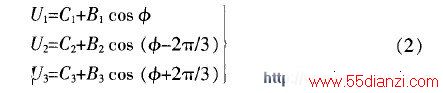
式中,C 、B ( i=1,2,3)分别为3路输出的直流分量和交流增益;为被测信号引起的光相位差.从(2)中解出Φ(t),再结合(1)式就可以得到加速度信号.求解Φ(t)的算法框图如图2所示.
www.55dianzi.com
解调输出信号:

结合式(1)和式(3)即可求出加速度a(t).
3 信号处理的硬件实现
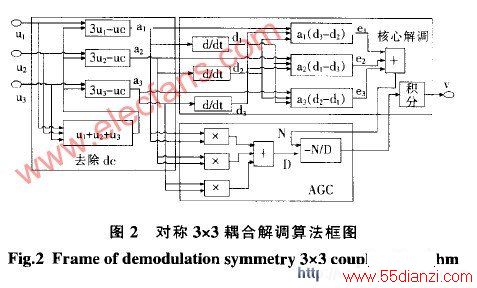
信号处理子系统的原理框图如图3所示。
以ARM(选用飞利浦公司的LPC2214)和DSP(Ti公司的TMS320VC5402)为核心,外扩信号调理、A/D采集、网络控制及液晶显示模块.以ARM作为系统控制中心,控制A/D转换器进行地震加速度已调信号的采集,经DSP的HPI接口将数据存储到DSP内部RAM 中.完成解调信号的网络传输控制、实时显示以及TMS320VC5402的HPI引导装载.而DSP主要进行信号运算,完成解调和FFT频谱分析.
LPC2214控制器片内有16 kbits RAM和256 kbitsFLASHl 31.为了便于系统升级,扩展了128 kbits的外部RAM 和2 Mbits的外部FLASH.由于DSP要对大量的数据进行运算,而内部RAM 空间有限且还要用于存放上电复位后的boot loader程序,所以扩展128 kbits外部RAM.
LPC2214有bank。 bank 4个外部存储器组,而对于图3中的系统设计,ARM扩展的存储器或外部I/O器件有6个.所以利用片选信号CS3、地址线A23、A22、A21和一片138译码器进行地址空间细分,此片外存储器或I/O 器件属于bank,组, 所用地址为0x83000000~0x83ffffff。
3.1 信号调理及A,D采集电路
信号调理最主要目的是为了去除信号中的噪声,使被测电压范围和AD采样范围相匹配以提高采样精度.本系统选用Anolog DevICe公司的ADA4861—3专用放大芯片.该芯片集成了3路放大器.采用单5 V供电.通过调节外接电阻的阻值可以获得1~1 900的放大增益,输出具有良好的线性度和温度稳定性.由于放大电路集成在芯片中.故减少了噪声的引入.
选择MD芯片主要考虑的性能指标有分辨率、转换速率、输入通道数、信噪比、输出接口等参数.因为所采集的加速度信号频率在1 kHz以内..根据奈圭斯特定理采样频率 >2 kHz就能无失真地恢复原信号,输入信号有3路,综合考虑以上因素本系统选用Anolog Device公司生产的AD7655芯片.该芯片支持4路输入(INA1、INA2、INB。、INB2),转换位数达16位,1MSPS的转换速率,单电源+5 V供电,串/并口输出方式,双通道同步采样.采样由A。引脚电平控制,A0=0,INA1/INB1采样同步;A o=1,INA~NB2采样同步问.参考电压 面接2.5 V,分辨率为2×VREF/655 36,约为76-3 V.
www.55dianzi.com
3.2 ARM 和DSP的接口电路
ARM 和DSP通过HPI接口进行连接.ARM先向DSP写入控制字,设置工作模式,然后将访问地址写入地址寄存器(HPIA),再对数据锁存器(HPID)进行读写,即可读出和写入指定的存储单元.主机由两根地址线A 、A 可以寻址到HPI接口的控制寄存器、地址寄存器和数据寄存器[51;由HBIL、HCNTL1、HCNTL0区分16位数据的高、低字节.当向HBIL=0的地址写入数据时,表示是第1个字节,向HBIL=I的地址写入数据表示第2个字节.并且在数据交互之前要设置控制寄存器中的BOB位,指示高地址在前还是低地址在前.这一步在程序初始化时由ARM来完成.DSP的片选信号接主机的nCS2,地址空间属bankz组,即0)【82000000~0x82眦DSP可以通过HINT向主机发出中断信号,通知主机一帧数据处理完毕.主机收到中断信号后读取约定的DSP内部数据空间中的数据进行显示或网络传输等处理操作.
DSP的引导装载采用HPI方式,中断2信号用于激活HPI自举模式.有两种方式可以用来获取中断2引脚上的输入信号:①将主机中断HINT与INT2直接相连:②在捕捉到DSP复位向量后的30个时钟周期内触发一个有效的外部中断INT2.由于本设计HINT信号用于向主机产生中断信号,所以HPI自举加载采用方式②.注意到在自举加载的开始,HINT引脚会产生一个有效的中断信号,所以ARM在初始化时要清除这个中断.
3.3 ARM 和DM9Ooo网络控制接口






