本程序中还有许多中断服务程序,都放在OS_CPU_C.C中。例如,为了使电机运转连续以保证悬索馈源舱系统做平稳的扫描运动,要求当前伺服指令执行后需要更新脉冲的频率(RC的值)和脉冲计数的个数(8254)在几毫秒内完成,同时又要有很好的实时性,必须采用中断服务方式实现。
3 测试
作者编写了底层硬件的驱动,把μC/OS-II成功地移植到AT91RM9200上,并编写了基于触摸屏图形控制界面。本系统中有三个可互相切换触摸屏图形控制界面,其中手动精调控制界面见图5。

图5 手动精调控制界面
本系统输出的脉冲可从7Hz到几MHz, AT91RM9200中TIOA(见图3)最高可输出15MHz的脉冲,但由于8254计数器的最高计数频率为10MHz,制约了整个系统的脉冲输出频率,这完全可以满足一般的伺服驱动器的要求。选择TC计数器(见图3)的CLK为TIMER_CLOCK2(7.5MHz),RA=1,RC=3,这时输出的频率应为CLK/RC=7.5/3=2.5MHz,占空比为(RC-RA)/RA=2,输出电压的平均值为3.3×2/3=2.2V,用Fluke 196C示波器测得实际输出波形与理论完全一致,如图6。
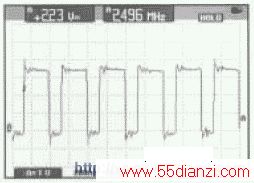
图6 Fluke 196C示波器测得实际波形
本系统在大射电 望远镜 5米模型上通过调试,运行良好。目前ARM处理器绝大部分都用于手持设备,对实时性要求不高,但工业控制中要求实时性高。本系统也只用到AT91RM9200处理器的部分资源,从某种角度上讲是有点浪费,但作者把ARM9处理器和μC/OS-II用在工业控制上是一次尝试,从控制的鲁棒性都证明了AR91RM9200和μC/OS-II在控制电机多轴联动的效果是令人满意的。如充分利用AT91RM9200集成的USB2.0接口、以太网10/100BaseT MAC控制器,完全可以满足复杂的工业控制。随着嵌入式系统和ARM处理器的发展,ARM处理器在工业控制中会越来越多。
参考文献:
1 段宝岩.新一代大射电望远镜机电光一体化设计研究[J]. 中国机械工程,1999;10(9):1002~1004
2 ARM920T TechnICal Reference Manual
3 Atmel EleCTRonics. AT91RM9200.date sheet.768B-ATARM.
4 SHAO Bei-bei 译. MicroC/OS-II The Real-Time Kernel (Second Edition).北京: 北京航空航天大学出版社,2003
5 佘海波.基于ISA总线的八轴联动伺服卡在大射电望远镜悬索馈源系统中的应用[J]. 电子机械工程,2002;18(2)
6 张玉魁. 大射电望远镜控制软件系统的研究.西安电子科技大学硕士学位论文, 2001;01






