本文介绍一种基于DSPIC30F6010芯片采用全数字双闭环矢量法控制三相交流异步电动机控制系统的结构及软硬件设计方案。以dsPIC30F60 10芯片为CPU的开发板、光电编码器、三相交流异步电动机、经过改进电流传感器的集成IPM的驱动电源和自制电平转换板,构建了一个异步电动机的矢量控制系统。试验结果表明,电机起动快速,运行平稳,具有较宽的调速范围,精度较高,满足了对三相交流异步电动机的调速控制。
20世纪80年代开始,电力电子、计算机技术和自动控制理论发展,为交流电气传动产品的开发创造了条件,使得交流传动逐步具备了宽调速范围、高精度、快速动态响应及四象限运行良好的技术性能。今天,电动机已经成为最主要的动力源,在生产和生活中占有重要地位。而交流三相异步电动机以其结构简单、制造方便、运行可靠、价格低廉和控制灵活等特点在交流电机中居于主导地位。随着高性能数字处理芯片DSP的广泛应用,三相异步电动机的调速进入了一个新阶段,其调速性能几乎可以与直流电机相媲美。本论文采用DSC(数字信号控制器),它属于嵌入式控制器,集成了单片机(MCU)的控制功能以及数字信号处理器(DSP)的计算能力,而且价格便宜。
1 系统硬件设计
1.1 矢量控制
异步电机在三相静止坐标系下的数学模型很复杂,关键是由于其复杂的磁链关系。因此,要简化数学模型,必须通过坐标变换将异步电机的数学模型从三相静止坐标系上变换到两相同步旋转坐标系上。从三相静止坐标系(ABC坐标系)到两相静止坐标系(Oab坐标系)的变换称为Clarke变换,从两相静止坐标系到两相同步旋转坐标系(OMT坐标系)的变换称为Park变换。
矢量控制也叫磁场定向控制,通过坐标变换,在两相同步旋转坐标系上,将电流矢量分解成产生磁通的励磁电流分量ism和产生转矩的转矩电流分量ist,并使两分量互相垂直,彼此独立,然后分别进行调节。这样,交流电动机的转矩控制,从原理和特性上就与直流电动机相似了,这就是矢量控制的核心思想。
1.2 硬件系统方案
本系统采用美国微芯公司的dsPICDEM1.1电机开发板,主芯片是dsPICD30F6010。总结构如图1所示。速度传感器用来检测速度;控制器用来接收检测的定子电流信号和速度信号,发出PWM信号;驱动电源用来检测定子电流信号、做交-直-交变换来控制电机。

1.3 dsPIC30F6010芯片简介
dsPIC30F6010包括16 b数据改良的哈佛结构;CPU具有24 b宽度指令;线性程序存储(ROM)容量达4Mx24 b;线性随机存储器(RAM)容量为32Kx16 b;16×16工作寄存器阵列;软件堆栈;快速、稳定的中断响应;可以支持3个操作数的指令A+B=C;扩展的寻址模式。该芯片工作电压为5 V;-40~85℃时,最高运算速度为30MIPS。本系统涉及的相关模块有电机控制PWM(MCPWM)模块、模数转换(A/D)模块、正交编码器接口(QEI)模块。
1.4 驱动电源的的原理和选择
三相交流异步电动机的驱动电源设计一般采用交-直-交方式,也就是先将交流电转变为直流电(整流、滤波),再将直流电转变成频率可调的交流电(逆变)。
驱动电源部分采用上海嘉尚电子的DR15A。它内部集成IPM(内部6个IGBT),具有过热、过压,过流、过载多种保护,同时还具有两相定子电流检测、直流母线电压检测和温度检测等功能。
1.5 电流传感器电平转换的设计
由于交流电机的定子相电流值按正弦变化,所以具有方向性,因此数值上有正有负。本文电流传感器输出电压范围是-4~4 V,而dsPIC的A/D转换参考电压范围是0~5 V,为了能利用控制器的A/D转换输出正确的值,必须将检测电流信号做电平转移和变换。
1.6 速度传感器的选择
速度传感器采用长春禹衡生产的LF型光电编码器。主要参数如下:
A,B,Z三相输出;5 V电压供电;输出电压(单位:V)VH>3.5,VL<0.5;上升时间<1μs;下降时间<1μs;响应频率为0~100 Hz;最大允许转速为6 000 r/min;启动力矩为0.05 N·m;轴、径向最大负载为50 N;惯性力矩为1.3×10-5N-m·s2;允许角加速度为1 000 rad /s2。能够满足对速度和位置的测量。
2 系统软件设计
软件设计根据前面介绍的控制策略、硬件系统进行编程、调试,主要完成以下功能:矢量控制的主程序、PWM时基中断子程序、A/D转换完成中断子程序、故障处理中断子程序、速度和电流的PI调节等。
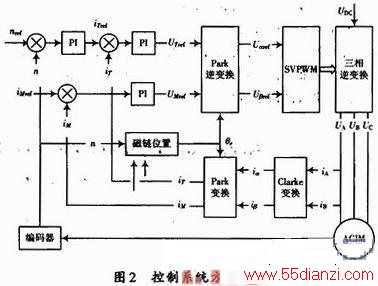
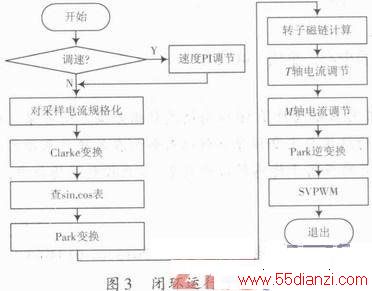
矢量双闭环控制系统方案如图2所示。闭环子程序如图3所示,具体思想如下:
(1)通过霍尔电流传感器测量逆变器输出的定子电流iA,iB,经过DSPIC30F6010的A/D转换器转换成数字量,并利用式iC=-(iA+iB)计算出。通过Clarke变换和Park变换将电流iA,iB,iC变换成旋转坐标系中的直流分量iM,iT,其中iM,iT作为电流环的负反馈量。
(2)利用4倍频的1 024线增量式编码器测量电动机的机械转角位移,并将其转换成转速n的PU值。转速n作为速度环的负反馈量。
(3)众所周知,异步电动机的转子机械转速与转子磁链转速是不同步的,所以用电流-磁链位置转换模块求出转子磁链位置,当定子电流M,T坐标系的分量iM,iT以及电动机的转速n已知时,可求出转子磁链位置θ,用于参与Park变换和逆变的计算。
(4)给定转速nref与转速反馈量n的偏差经过速度PI调节器,其输出作为用于转矩控制的电流T轴参考分量iTref。iTref和iMref(采用保持恒磁,设其值为0)与电流反馈量iT,iM的偏差经过电流PI调节器,分别输出M,T旋转坐标系韵相电压UMref和UTref。UMref和UTref再通过Park逆变换转换成在α,β直角坐标系的定子相电压矢量的分量Uαref和Uβref。
(5)当定子相电压矢量的分量Uαref和Uβref及其所在的扇区数已知,利用七段法电压空间矢量SVPWM技术,产生PWM控制信号来控制逆变器。
3 系统测试
本试验用的是YS-7124系列鼠笼式三相交流异步电动机,其中功率为370 W,额定电流为1.94A/1.12A,额定电压为220 V/380 V,额定频率为50 Hz,额定转速为1 400 r/min,效率为69.5%,功率因数为0.72,堵转转矩/额定转矩是2.4,堵转电流/额定电流是6,最大转,矩/额定转矩是2.4。
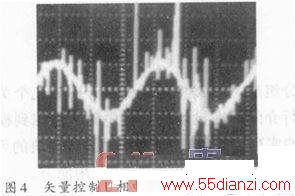
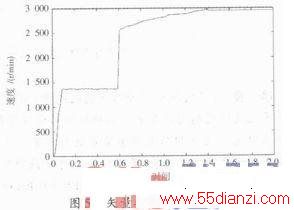
进行了开环SVPWM控制试验、速度单闭环SVPWM控制试验、矢量双闭环控制试验。以1 000 r/min为例,定子电流如图4所示,可以看出矢量控制双闭环的速度波动要比启动运行时的电机速度波动要小,而且在同一PI调节参数下,速度调节要比单闭环更平稳。图5是矢量双闭环控制的速度波形,可以看出本控制系统速度响应快,运行平稳,稳定时速度误差小,说明系统运行良好。
4 结论
本文使用dsPIC30F6010芯片实现软件全数字化,在保证控制精度的同时相比单片机免去了很多硬件,避免了硬件系统过于繁杂的不稳定性,在价格上要比相应的DSP便宜。所以本系统即简化了硬件电路,又节省了成本。从实验结果看出,该系统速度响应快,运行平稳,稳定时速度误差小,说明系统运行良好。






