本文研究了基于DSPIC30F6010的无刷直流电动机有位置传感器法和反电势过零检测法两大调速系统。完成了硬件和软件的设计,并进行了测试。试验结果表明,电机起动稳定快速、正常,运转良好,具有较宽的调速范围,精度高,满足了无刷直流电动机高性能伺服控制的准确性与实时性的要求。
无刷直流电动机作为机电一体化产品,由于其既具备交流电动机的结构简单、运行可靠、维护方便等一系列优点,又具备有刷直流电机的运行效率高、无励磁损耗以及调速性能好等诸多优点,同时克服了有刷直流电机由于机械电刷和换向器的存在所带来的噪声、火花、无线电干扰以及寿命短等弊病,并且制造成本低,简化了电机的维修,使得它在工业上的应用也越来越广泛。本文涉及的系统以dsPIC30F6010为核心的数字信号控制器(Digital Signal ControlIer,DSC)为基础,迎合了控制领域的数字化和智能化的趋势。目前在控制上较多应用以DSP作为控制器,传统的DSP用做数字信号处理,使其在满足系统快速性和实时性的基础上兼顾控制能力。而dsPIC30F6010作为一款为控制领域应用的数字信号控制器,是一款性价比优越的控制器(略低于DSP),保证控制要求的前提下加快了运算速度。
1 系统硬件设计
1.1 控制器dsPIC30F6010简介
dsPIC30F6010为16位(数据)改进的哈佛结构,是一款专为电机控制应用设计的80引脚的DSC。它运算灵活,数据处理能力强(内部有两个40位的累加器),指令集灵活并且支持小数运算。该DSC内部包含4M×24位的数据RAM、4 KB的E2PROM和32 KB的FLASH程序存储空间,便于构成最小的控制系统。该DSC拥有丰富的外设,适合各种电机的数字控制,其中专门设计了8路死区时间可编程的PWM输出通道(可控制四相电机)和5个16位计时器,可以直接用于控制电机;具有的4个16位的输入捕捉和输出比较功能,可以方便地捕获电机位置传感器信号;16通道10位A /D转换器可用于处理电机速度反馈、电压、电流等模拟信号的采用,实现电机的各种控制功能;专为编码器设计的QEI编码器接口;而且它具备故障检测接口,可以很好的对电路进行保护。
1.2 驱动电路
智能功率模块(Intelligent Power Modulation)不但提供一定的功率输出,并且具有逻辑、控制、传感、检测、保护和自诊断等功能。它内含驱动电路、保护电路,可实现过流、短路、欠压和过压等保护。由于采用了隔离技术,散热更均匀,体积更加紧凑。如果与单片控制芯片结合则可以实现两片式集成化控制系统。故成为当今电机控制系统开发者首先考虑的选择,可提高系统可靠性,大幅度降低开发时间和费用。
本文采用的是以三菱公司生产的第三代单电源供电智能功率模块(IPM)PS21563为核心组成的驱动电路。并设计了其外围电路:光耦电路、自举电路、短路保护电路。
1.3 有位置传感器法硬件系统
给定转速与速度反馈量形成偏差,经速度PI调节后产生电流参考值,它与电流反馈值的偏差经电流PI调节后形成PWM占空比的控制量,实现电动机的速度控制。以下为如何根据位置参数确定速度以及电流检测的方法:
(1)位置检测与速度反馈值的计算。图1为无刷直流电动机三个空间上相差120°霍尔信号的电平变化图形。每一个霍尔传感器都产生180°脉宽的输出信号。从图1中可以看出只要任意一阶段电平变化就到了换相时刻,检测到三个霍尔信号的电平状态(这里称之为换相控制字)即可给相对应的开关管打开或关闭。

(2)电流的测量。采样电流的检测一般是由采样电阻或电流传感器经滤波放大后送入控制器进行A/D转换,把数字量转化为模拟量。在本试验中采用0.03 Ω采样电阻来进行试验。
有位置传感器法无刷直流电动机硬件系统框图如图2所示。
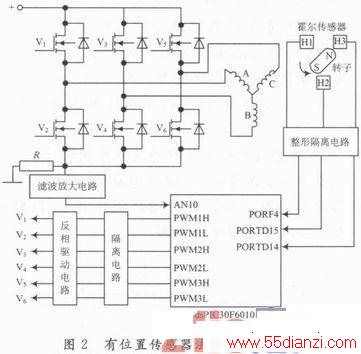
图中A、B、C代表无刷直流电动机定子绕组三相,V1~V6为功率开关管,由IPM提供。其中整形隔离电路由光耦TLP521对三个霍尔信号进行隔离处理。滤波放大电路主要采用放大器LM324N。
1.4 反电势过零检测法硬件系统
反电势法的基本原理就是在忽略永磁无刷直流电机电枢反应影响的前提下,通过检测“断开相”(逆变桥上下功率器件皆处于关断的那一相)的反电势过零点,来依次得到转子的六个关键位置信号,并以此作为参考依据,轮流触发导通六个功率管,驱动电机运转。三相无刷直流电动机每转过60°电角度需要换相一次,而转过一周需要6个换相点。每一个过零点延迟30°电角度即为换相点,那么只要找到感应电动势过零点,再将其延迟30°电角度即可找到换相点。
反电势过零检测法无刷直流电动机硬件系统框图如图3所示。
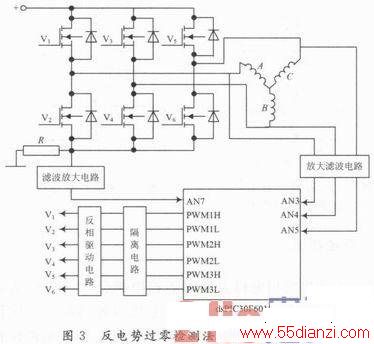
从图2,图3中可以看出,反电势法与有位置法硬件上的不同是检测位置信号的不同。它是由相电压检测电路取代位置传感器和测量电路。采用廉价的分压电阻和滤波电容组成相电压测量电路。电流信号和各相电压信号经过放大后,分别与控制器的AN3,AN4,AN5,AN7连接。
2 系统软件设计
软件设计主要采用MPLAB IDE 7.40作为开发环境。MPLAB IDE是一种在PC机上运行的软件,用来为MICroChip单片机开发应用程序。软件设计根据前面介绍的控制策略,硬件系统进行编程、调试,主要完成以下功能:PWM信号的产生、转子位置检测、故障引脚的使能、速度和电流的计算等。
2.1 有位置传感器程序总体结构设计
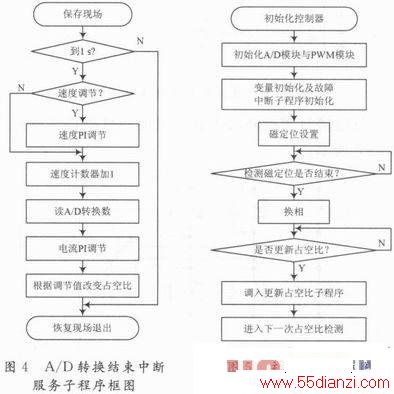
整个控制系统的软件部分由主程序、A/D中断服务子程序(其中包括速度调节子程序和电流调节子程序)、电平变化中断子程序以及故障引脚子程序和中断陷阱组成。图4是A/D转换结束中断服务子程序流程图。
2.2 反电动势过零检测法程序总体结构设计
主要进行了速度调节、感应电动势、换相时刻等的电机参数的计算。设计了主循环程序和A/D转换程序。图5是主循环程序流程图。
3 系统测试
本试验所用电机为珠海运控电机公司生产的方波驱动的三相无刷直流电动机。电机内置的霍尔位置传感器采用的是SS40系列的SS41霍尼韦尔开关量位置传感器。其相关参数如下:额定转速3 000 r/min,额定转矩0.22 N·m,转矩系数0.052 2 N·m/A,额定电源电压24 V,额定功率70 W,额定电流5.18 A,5对极,三相绕组电阻0.488 Ω,三相绕组自感1.19 mH,转动惯量1.68×10-5kg·m2,电势系数0.048 2 Vs/rad,电气时间常数2.44 ms,机械时间常数0.338 ms。
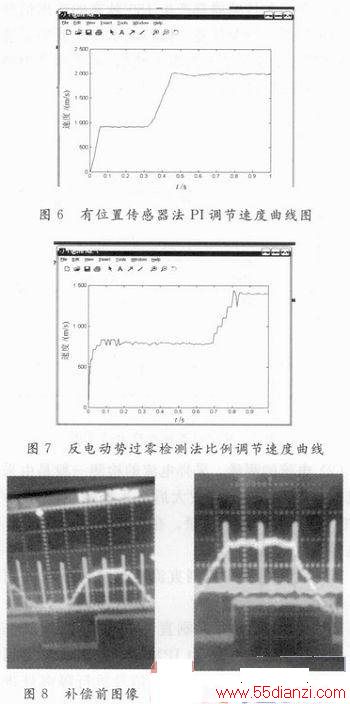
进行了开环实验和闭环实验。在闭环实验中,通过将存储空间中3 000个点的值整理成图形得到速度曲线如图6,图7所示,其横轴为时间,纵轴为转速。图6可视为一个二阶系统,从中可以看出,采用双比例调节时,电机启动正常、系统超调量小、转速精度较高。图7同样可视为一个二阶系统,从图中可以看出,采用PI调速系统时,电机启动平稳、系统超调量小、转速精度高。
对无刷直流电动机做了补偿,利用4通道数字示波器观测并调整换相点与感应电动势波形换相点的误差,并与霍尔传感器做比较。
在反电动势过零检测法中,在补偿前图像如图8所示,补偿后图像如图9所示,通过两者对比可发现,补偿后图像某一相感应电动势与换相符号之间更为合理,换相点更为精确。其中黄线表示感应电动势波形,蓝线表示采样换相信号,紫线表示霍尔信号电平变化。
4 结论
采用DSPIC30F6010专用电机控制芯片,其硬件结构简单、控制能力强、软件实现方便、控制精度高、实时性强,能实现更为复杂的算法,升级空间较大,其高速的执行性能和丰富的内置资源很好的满足了高性能无刷直流电动机调速控制系统的设计要求,在电机控制领域具有广泛的应用前景。开环环境下可以很迅速的达到速度要求。在闭环控制中启动、运行良好,反应速度快。
本文关键字:电动机 DSP/FPGA技术,单片机-工控设备 - DSP/FPGA技术






