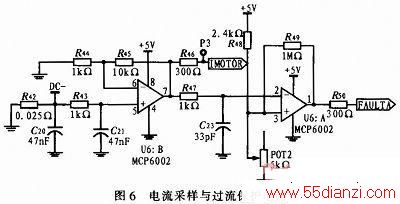
DSPIC30/33的电机控制系列MCU,都有一个FLTA脚,当得到低电平输出时,可以关断PWM的有效输出,使之成为无效。这是一个硬件处理的机制,因此可以快速处理故障事件,以实现安全操作。通过与电流反馈电路相连接的比较器电路(U6)可以获得故障输入信号,且比较器门限值可通过电位器POT2进行调节。
2 系统软件设计
软件设计包括DSC事件管理器初始化程序、电机起动程序、换相子程序、中断服务程序、速度环和电流环的控制程序等。主要实现了电机的开环启动、过零检测、换相、以及转速和电流闭环控制等。软件设计是在MicroChip公司的集成开发环境MPLAB IDE中完成的,控制程序用C30语言编写。
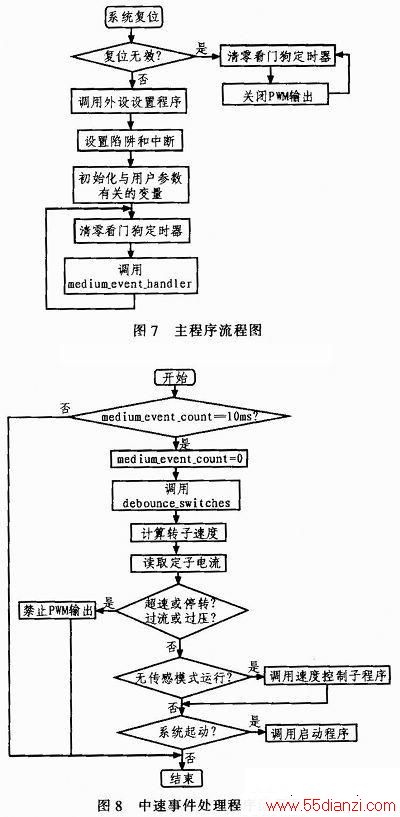
主程序是一个死循环结构,用来完成dsPIC30F3010初始化、看门狗程序和中速事件处理程序。软件结构是以主程序为主,通过函数调用和全局变量与子程序进行参数传递。中速事件处理程序每10 ms循环一次,包括电机启动、速度控制、电流A/D转换及循环调用中断服务子程序等,是整个系统最重要的程序。主程序流程,中速事件处理程序流程分别如图7、8所示。
软件设计需注意以下4个问题:1)使用电机控制PWM模块的特殊事件触发器来启动A/D信号转换,可以使A/D转换与PWM时基同步。2)应舍弃换相后的最初几个反电势采样点,这样很容易避开相绕组的去磁问题,因为换相后绕组电流不会立即为零,要经过一个续流过程下降为零。3)不对端电压波形用硬件进行明显滤波,而是由软件根据PWM波形仔细地选取信号采样点,可排除互耦PWM于关噪声和不连续电流问题。4)使用QEI计数器记录连续监测到两个端电压过零点的时间,除以2即为30°电角度的时间,把此时间装载到定时器2中,定时器2经过30°电角度时间触发中断,调用换相子程序进行电子换相。
3 实验结果
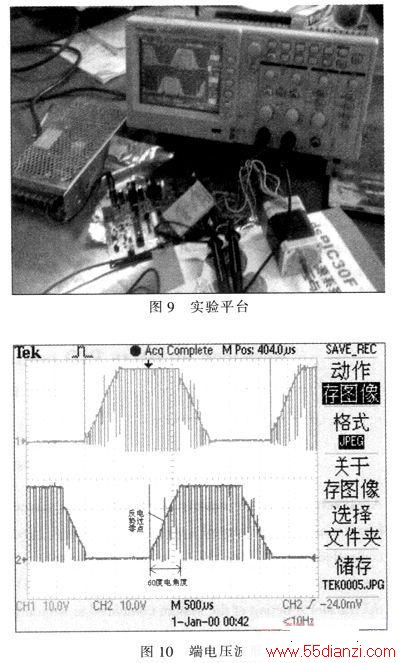
以42BLF02型24 V,52 W,最大电流9.4 A,额定转速为4 000 rpm的三相八极无刷直流电机为实验对象,采用转速、电流双闭环调节方式。实验平台以及电机稳定运行时其中两相端电压波形分别如图9、10所示。
在硬件和软件分别调试成功后,基于DSPIC30F3010芯片的无位置传感器控制系统能够控制电机顺利起动,并且很好地实现了实验电机的正确换相,保证了无刷直流电机正常运行。整套方案是切实可行的,试验结果也是比较理想的。
电机正常运行时端电压波形如图10所示,从图中可以看出端电压波形是较好的梯形波,与理论上的端电压波形一致。在箭头所指的60°电角度区间,该相绕组处于悬空状态,而另两相绕组处于工作状态。由理论分析可知,在相不导通时,相端电势等于相反电动势与1/2电源电压的叠加,从图中可以看出,在相不导通时,反电动势过零出现在相不导通时的中间位置,且有12 V的偏移量,与理论分析完全相同。
4 结论
本系统在无刷直流电机无位置传感器控制系统的软硬件方面都采取了简约的设计方案。通过实验证明,采用上述控制技术,电机系统起动平稳,无振动和失步现象。与采用单片机的同类系统相比,DSC控制系统能够达到相当的功能与控制精度,而成本更低,简化了硬件的设计,是无刷直流电动机控制器的理想选择。






