在跟踪目标的过程中,目标在视场中可能会被短时遮挡而丢失;另外当目标在视场中停留,则目标可能融入背景,也会出现目标丢失的现象。针对这两种情况,当目标短时遮挡,根据存储记忆以前各帧和本帧的目标信息,采用微分线性拟合外推方法预测下一时刻目标的位置。而当目标在视场停留时,首先按目标被遮挡处理,当外推有限步,或是外推到接近边界时目标仍未出现时,则确定该目标在视场停留,标记停留位置,当目标再次出现时继续完成跟踪。
4、系统工作状态分析
为实现使自动有序的跟踪,我们确定系统各个跟踪状态和各状态之间的转换条件。
本系统跟踪状态有四种:
本系统转换条件有三种:
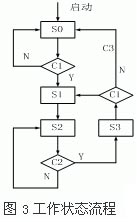
系统状态转换情况如图3所示。在 视频跟踪装置 启动并初始化后,进入搜索状态S0,系统按照一定的扫搜规律进行搜索;当形心跟踪模块发现移动目标,则进入捕获状态S1;由相关跟踪模块对目标进行识别,确认后进入正常跟踪状态S2;当目标偶尔丢失时,系统通过自学习对当前目标进行预测跟踪,并试图再捕获目标,进入预测跟踪状态S3;如果目标完全丢失,则改变搜索策略,重新再搜索,以便有可能再次捕获目标。
5、结论
本视频跟踪装置在设计上能完成对移动目标的检测和跟踪,初步实验结果表明采用基于DSP和 FPGA 的硬件实现算法使系统的实时性能得到很大提高。双模式的图像跟踪算法使系统适合多种背景下的移动目标跟踪,自适应能力强,抗干扰性能好,具有锁定目标短暂丢失后的再次捕获能力,提高了跟踪的可信度。但本设计拟在下面两个方面作进一步的研究。一是考虑本装置的军事应用背景,需要目标,尤其是远方目标有相对较高的速度才能触发系统捕获,因此没有考虑摄像头自身跟踪时的运动补偿[8]。否则,必须加入摄像机运动估计和补偿;二是对移动目标的识别能力还需加强,在设定特定跟踪目标上,尤其是跟踪到多个移动目标时,不具备区分的能力,需要改进到能识别设定中的跟踪目标并完成对设定目标的跟踪。
本文关键字:暂无联系方式DSP/FPGA技术,单片机-工控设备 - DSP/FPGA技术






