1、引言
机载光电稳瞄产品大量装备于各种类型飞机上,其核心是 陀螺 稳定平台,主要作用在于隔离载体的角扰动,使安装在载体上的 光学传感器 的视轴在惯性空间内保持稳定,使光学传感器得到清晰的图像。稳定控制最直观的方法是将光学传感器系统安装在减震装置上,减振器可以隔离载体的高频低振幅振动,但是减振后的低频振动仍然会对视轴产生扰动。因此,这种被动隔离的方法常与主动隔离的方法混合使用。主动隔离的方法有:整体稳定、齿轮传动稳定、光学稳定、电子学稳定和动量轮稳定[1]。
机载光电稳瞄稳定控制算法除了经典控制还有各种先进的控制算法,如:最优控制、变结构控制、神经网络及模糊控制等。从目前的文献资料来看,这些先进的算法大都限于仿真研究,实际用于产品的报道很少。目前,机载光电稳瞄产品以经典控制模拟电路实现为主。
模拟控制的实现依赖于集成电路和分离元件,设备间的信号传递均采用模拟量,导致控制器元件众多、结构复杂、体积庞大,同时在模拟电路的硬件基础上,要想实现各种复杂的现代控制方法几乎是不可能的。数字控制系统以程序代替硬件,有利于减小电路的体积,降低成本,在信号处理、算法实现上具有模拟控制无可替代的优势。数字控制是整个伺服控制领域的发展趋势。随着科学技术的发展,对机载光电稳瞄的稳定精度、动态品质的要求越来越高。因此,必须采用先进的数字控制技术,运用现代控制算法,设计出高性能的陀螺稳定平台控制系统,以满足实际系统的要求。
2、机载光电稳瞄系统工作原理
系统的控制环路如图1所示,系统包含三个环路,内部为电流环,电流环控制流过电枢的电流尽可能严格跟随电流指令,改善电流跟随电压的动态特性,包括超调和调节时间等,抑制电子噪声和反电势等的影响。中间为速度环,即稳定环。稳定环是光电稳瞄系统的关键,光电探测器的机(船、车)载应用直接受伺服系统稳定环性能的影响[2]。稳定环采用速率陀螺作为惯性敏感元件,检测光电稳定平台方位和俯仰轴角速度,与速度命令信号形成误差电压,该误差电压通过稳定控制器在直流电机轴上产生稳定力矩,从而实现光电稳定平台抑制扰动、保持在惯性空间相对稳定。外部为位置环,通过比较输入信号与反馈信号产生控制偏差,借助位置控制器校正补偿输出到稳定环对光电稳瞄实施控制。在目前的稳瞄产品中,三个环路的控制器除了位置环控制器为数字控制器,稳定环控制器和电流环控制器均为模拟控制器。本文研究的目的是将稳定环用数字控制方式实现。
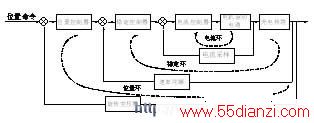
图1 光电稳定平台控制系统环路
3、控制系统建模与设计
建立数学模型
从前面的分析可知,稳定环路控制的对象为包括稳瞄转塔的电流闭环,对电流闭环分析如下:
PWM驱动模型如图2所示。本系统中采用的是双极性四桥式PWM驱动,其传递函数可以写为:
![]() (1)
(1)

图2 PWM驱动模型
当PWM开关频率较高,并且系统的截止频率时,上式可以简化为:
![]() (2)
(2)
其中kPMW= 电源电压/三角波电压;T为PWM开关周期。
一般来说T非常小,可以忽略延迟环节。
电机模型
电机选用的是永磁直流力矩电机,系统采用的是电压调速。由此可以得到电机的模型:
![]()
![]()
![]()
![]() (3)
(3)
其中R为电机绕组电阻,L为电机绕组电感,U2表示调制电压输入,I表示流过电机绕组的电流,E为电机绕组反电势,J为负载转动惯量,M为电机输出力矩,ω为电机转速(即负载转速),Ce和Cm分别为电机的反电势常数和力矩常数。
这样可以得到整个电流环闭环结构形式如图3所示,图中Md为干扰力矩。
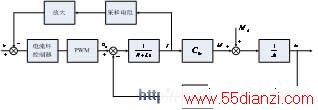
图3 电流环反馈框图
根据实际电路计算,得到电流环控制器为:
 ,其中
,其中![]() (4)
(4)
3.1 控制器设计
光电稳瞄一般为两轴或三轴陀螺稳定平台,各个轴从控制系统的构成来讲,具有相似结构。两轴平台包括方位轴和俯仰轴,这里以方位轴为例进行控制器设计。
光电稳瞄系统所用陀螺为速率陀螺,从陀螺的资料手册上查得的陀螺数学模型[3]为:
![]() (5)
(5)
式中:kg=10,ω=100Hz,ξ=0.707。
根据前面的分析建立经典控制系统 Simulink 仿真模型如图4所示。
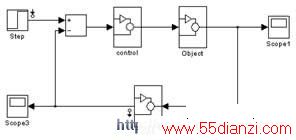
图4 经典控制系统Simulink仿真模型
利用Simulink中的线性化工具将对象线性化,其结果作为 sisotool 控制器设计的基础,从sisotool工具箱中设计控制器:
![]() (6)
(6)
设计后系统根轨迹和开环频率特性结果如图5所示。
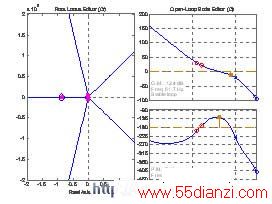
图5 sisotool工具箱设计的控制器
从图中可以看出系统幅值裕度为12.4dB,相角裕度为51.6º。
3.2 控制系统仿真
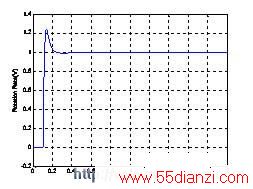
将设计的控制器加入系统 Simulink 仿真模型得到系统阶跃响应结果如图6所示,频率特性如图7所示。
上一篇:基于单片机的等精度数字测频






