关键词:电压型整流器;PWM整流回馈;神经网络控制
Abstract:This paper designed a double close loop control system based on current and voltage. As the system instable in some cases, the traditional PI regulator can not regulate the system more precisely. To make a more stable and better control effect, it should be improved by using Neural Network Control to get a feedback adaptive control system of PWM rectifier in order to achieve better results. Finally on the basis of theoretic analysis, two diode voltage source type AC-DC-AC rectifiers has been reconstructed to do the experiment. The test waveforms and analysis results show that the design improved the accuracy and effectiveness of the control system.
Keywords: Voltage Source Rectifier; PWM Rectifier Feedback ; Neural Network Control
引 言
近年来,交流变频调速技术在我国有了突飞猛进的发展,变频调速在各方面的优异性能,是其他的交流调速方式无法比拟的。然而其弊端也日趋显露,主要表现为:恶化了供电系统的供电质量;谐波电流及其产生的谐波电压导致系统中的控制、保护和测量装置误动作;整流器处于深度相控工作时,电网侧功率因数低,降低了发电和输电设备的利用率,同时产生大量的附加损耗;于整流元件的单向导电性,电机制动的再生能量无法回馈给电网。
随着电力电子器件不断发展及DSP控制芯片性能的不断提高,实现采用双PWM的变频器已成为可能。所谓双PWM变频器即整流和逆变均采用IGBT开关器件进行可控整流和逆变,逆变部分在电机控制上已非常成熟,所以说整个系统的控制关键在于整流部分。由于该技术可以实现能量快速回馈,且功率因数高,因此它在小型水电、风力发电能量回馈的控制方面有着广泛的运用。
1 三相桥式PWM整流器主电路建模分析
1.1 三相VSR系统模型
三相VSR主电路结构如图2.4所示, T1~T6为整流器功率开关管,D1~D6为续流二极管,在功率管不导通时,电流可以在二极管中续流,该图也是系统设计整流回馈部分的等效电路图。
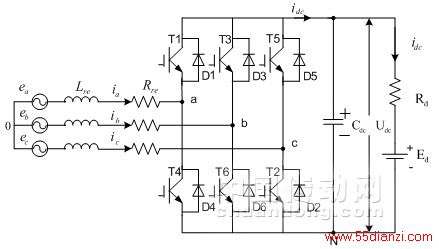
图1三相VSR主电路结构
根据上图及基尔霍夫电压定律,电流平衡方程可得该电路在三相静止(a,b,c)坐标系下的一般数学模型:

其中Sk为开关信号,其定义如下:

这种一般数学模型具有物理意义清晰、直观等特点。但在这种数学模型中,三相VSR交流侧均为时变交流量,因而不利于控制系统设计。
1.2 基于两相旋转坐标系系统模型
在三相静止坐标系下,ea、eb、ec以及ia、ib、ic存在耦合。通过坐标变换可以简化系统模型,将三相静止坐标系abc变换到两相同步旋转d-q坐标系。其中d轴与三相电压合成矢量方向重合且以角速度ω逆时针同步,q轴超前d轴90。变换分“等量”坐标变换和“等功率”坐标变换,本文所设计的变换均采用“等量”坐标变换。所谓“等量”坐标变换,是指在某一坐标系中的通用矢量与变换后的另一坐标系中的通用矢量相等的坐标变换。坐标系之间的关系如图2.5所示,图中 为三相输入电压的合成矢量[22]。
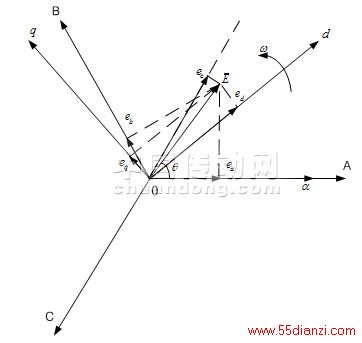
图2 坐标系abc和d-q坐标系之间的关系
遵循等量变换的原则,上述变换关系可以用下面的变换矩阵描述:
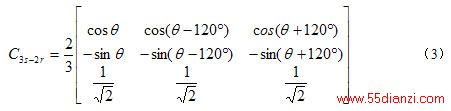
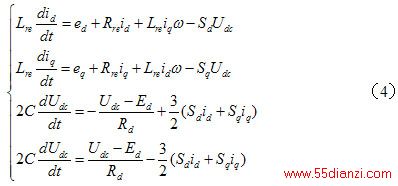
根据式(1)和式(3),可得到三相VSR在旋转两相d-q坐标系下的系统模型为:
2 三相VSR控制方法
由已知的两相旋转坐标系d-q系统模型,可以得到d-q两相电流微分方程为:

由此,可以将系统电流内环设计为:
根据上述分析,构造如下图所示的变流系统双闭环控制结构。外环为电压环,控制直流母线电压的输出,通过直流母线电压给定和反馈得到系统输出电压误差,经过电压调节器计算有功电流给定 。其值决定有功功率大小,符号决定功率流向。系统内环为电流环,其作用是控制电流响应。控制框图如图3所示。
。其值决定有功功率大小,符号决定功率流向。系统内环为电流环,其作用是控制电流响应。控制框图如图3所示。
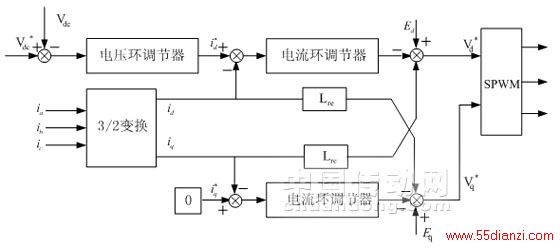
图3 三相VSR基于同步旋转变换方案控制框图
然而上述系统也有所缺陷,要保证输入功率因数cosφ=1,则必须始终保持无功电流 =0。不过在实际操作中这一点是很难做到的,系统始终会有少量的无功分量是无法去除的,即不可能全为零。当负载突变的情况下,反馈到电流环上的无功分量必将放大,这样就会产生很大的误差,使系统发生振荡而不稳定。同时该系统属于非线性系统,有关的参数并不好测,使得传统PID调节无法做出优化。为了避免这些问题的产生,本文通过引入神经网络控制的方法对系统进行改进,以达到系统自适应调整从而消除超调的目的。
=0。不过在实际操作中这一点是很难做到的,系统始终会有少量的无功分量是无法去除的,即不可能全为零。当负载突变的情况下,反馈到电流环上的无功分量必将放大,这样就会产生很大的误差,使系统发生振荡而不稳定。同时该系统属于非线性系统,有关的参数并不好测,使得传统PID调节无法做出优化。为了避免这些问题的产生,本文通过引入神经网络控制的方法对系统进行改进,以达到系统自适应调整从而消除超调的目的。
3 神经网络控制
神经网络应用于控制系统设计主要是针对系统的非线性,不确定性和复杂性进行的。由于神经网络的适应能力,并行处理能力和它的鲁棒性,使采用神经网络的控制系统具有更强的适应性和鲁棒性。本文主要对神经网络中的直接控制进行介绍。
3.1 神经网络直接控制概述
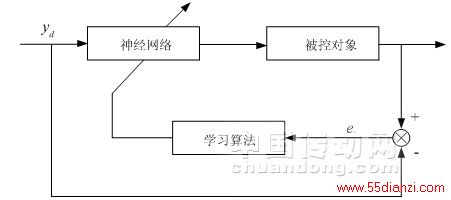
随着神经网络研究的深入,神经网络在控制中的应用已从开始的仿真研究,逐步走向了应用研究。在诸多神经网络控制方式中,虽然直接控制还不能从理论上直接得到基于未知非线性系统输出误差的网络权值调整方法,但是“简单是真的印记”这句拉丁格言一直影响着人们在工程上的选择。因此,神经网络直接自适应控制以其结构简单,算法简洁,工程上易于理解而倍受人们的重视。神经网络直接控制结构如图4所示。
本文关键字:暂无联系方式电工文摘,电工技术 - 电工文摘






