这里根据古典PID控制的精髓,提出一种新的神经网络直接控制器,其网络权值由三部分组成:比例项,积分项和微分项。积分项即为传统神经网络权值部分,其作用是产生记忆,保证控制的连续性和稳态收敛精度;比例项和微分项的作用则保证了在控制误差出现时网络权值具备“瞬间”的应变能力,从而产生相应的调节控制量。微分项还具有一定的变结构控制能力,可以增强控制器的鲁棒性。
3.2神经网络控制器的设计
本文根据离散PID控制算法来构造神经网络控制器[38],并将其应用于实时控制。
通常PID控制算式为:

将式中的积分用求和代替,将式中的微分用有限差分代替,则式(7)可近似为:

在控制过程中,三个权值ω1、ω2、ω3依据偏差来修正。如偏差小于给定误差时,则权值不再修正。由网络构成的系统控制如图5所示:
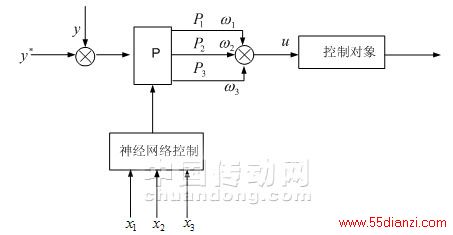
图5 神经网络控制器结构图
网络权值修正公式为:

其中,Ly为学习步长,y*为给定值,y为输出值,u为计算出的控制量,x1,x2,x3为待送入的参考量。
学习步长Ly一般取(0,1)之间的数,它的大小决定网络权值的调整幅度,网络的初始权值ωi(0)不仅关系到网络能否到全局最小点,同时对网络学习时间的长短有较大的影响。神经网络理论中,一般取随机数作为初始权值。根据我们设计的神经网络控制器的特点,我们取主电机的PID参数值来调整初始权值。
4 PWM整流回馈自适应控制系统
4.1 系统设计
本节是利用前面所述章节的理论基础对系统进行具体设计,来达到控制要求。整流部分的设计是基于PWM整流器解耦控制,主要包括以下几个部分:坐标变换、PWM波形的产生、数字PI调节器的实现,以及引入的智能模糊神经网络控制器,如图6所示:

图6 基于逆变输出的PWM整流回馈自适应控制系统
系统网侧根据电压及电流采样算出功率因数cosφ。系统给定是直流母线电压指令U*dc,这个指令与直流母线电压反馈Udc的误差送到神经网络控制器待计算。电流反馈ia,ib,ic经abc/dq变换变成两相旋转坐标系d-q下的电流ifd,ifq。其间,电流检测亦经abc/dq得到两相旋转坐标系d-q下i*fd,i*fq,作为两个重要参数连同功率因数cosφ送入智能模糊神经网络控制器进行自学习,并与相应的电流指令的误差送达电流环PI调解器产生电压指令U*pd、U*pq,经计算单元得电压Upd、Upq,再经2r/2s变换两相旋转坐标系d-q下电压Upd、Upq变成两相静止坐标系 下的电压Ud、Uq,并按产生的PWM信号控制IGBT管。以判断能量整流亦或是逆变,以及其变换速率,以便PI参数的自整定,加快系统的响应速度,使系统快速跟随逆变侧的变化,实现快速回馈。
其中i*fd的调节可以使得系统在负载突变状况下不会造成大的扰动,而调节过程要用到模糊控制的相关算法,本文仅用到神经网络的控制算法对其他参数进行调节。而通过模糊控制调节i*fd的算法过于复杂,计算量也较大,这里并未讨论,但可以作为以后课题继续加以研究。
利用神经网络控制器,可以对非线性系统进行自调整,不需要精确测出有关参数,而只要将相关量放入控制器中进行自我学习,再送入PI调节器中进行整定即可。通过引入神经网络控制器,使得系统整流侧与逆变侧的能量保持相等,且能量能快速的双向流动,而不至于将多余的能量储存在直流电容上造成能源的浪费。同时,可以保持网侧功率因数为单位功率因数,即cosφ=1。
4.2.基于系统的神经网络控制器的设计
根据第三章内容将系统中具体的量带入到神经网络控制器中得到基于系统的控制器,如图7所示。
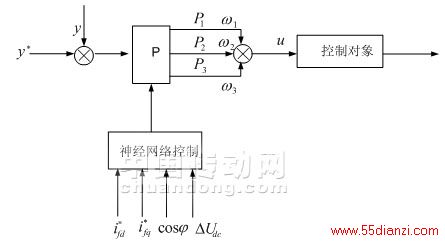
图7 模糊智能神经网络控制器
送入控制器的有四个量:逆变侧经坐标变换后得到的电流有功分量i*fd,无功分量i*fq,系统功率因数cosφ,输出电压的误差分量 ,我们这里给出除i*fq外的其他三个参数经过控制器自学习的计算公式,其中:
,我们这里给出除i*fq外的其他三个参数经过控制器自学习的计算公式,其中:
由图6看到智能模糊神经网络控制器分别对有功及无功环进行控制。
有功环通过 及 进行自学习,则网络权值修正公式可写为:

4.3 系统实验及结果分析
本文实验所使用的设备是由直接购买两台二极管电压型交-直-交变频器,并联二变频器的直流侧,不可控整流部分悬空。因其逆变侧采用的是IGBT,使一台变频器的逆变侧为快速回馈系统的整流侧,另一台变频器的逆变侧为快速回馈系统的逆变侧,且采用PWM控制技术。将直流电机部分作为负载,将全数字直流调速器运行于力矩模式,为交流电机提供负载。
验中,网侧相电压为220V,频率为50Hz。实验波形采用FLUKE电源质量分析仪进行拍摄得出。实验均以a相输入电压、电流波形为例,进行说明,如图7,图8所示。
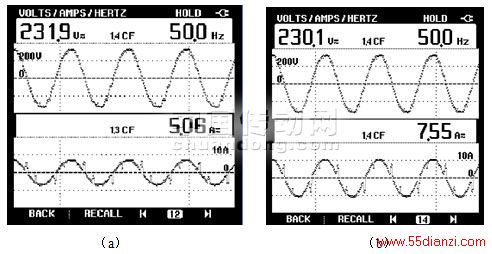
图7 传统PI调节的整流输入 实验波形
实验波形

图8基于神经网络控制器的整流输入实验波形
由图7(a)可知,在利用传统的PI调节器时,此时输入电流值为5A,而ia波形上出现了纹波,这是由于IGBT管在短时间内来不及换相所致,同时还能发现电流波形相对于电压波形有所滞后,说明此时功率因数有所偏离。当输入电流值增大到7A时,如图7(b)所示,ia波形上的纹波更加明显,此时ia同样滞后于ua,功率因数偏离更明显。
而由图8(a),(b)所示,当加入了神经网络控制器控制系统后,无论电流值多大,ia波形上的纹波都消除了,呈现的是完美的正弦波,并且ia始终与ua同相位,即系统的功率因数为1,达到了本课题系统设计的要求。
结束语
基于逆变输出的PWM整流回馈自适应控制系统因其具有输入电流正弦性好,可获得单位功率因数,能量可实现双向流动等特性,是目前电力电子领域中被广泛研究的课题之一,特别是在小型水电、风力发电能量回馈的控制方面有着广泛的运用。并且随着电力谐波治理和无功补偿技术的发展,三相高功率因数可逆整流器的开发已成为大功率AC-DC可逆变换器的最佳选择,也是AC-DC-AC可回馈变频器的核心。
本文将智能模糊神经网络控制器运用于传统的双PWM变频系统中,该方法与常规 PID控制器相比,能够实时在线地按照系统的偏差对控制器参数进行自我调整,从而提高了控制器的自适应能力和鲁棒性,大大提高了系统的动态性能。该方法也是为改进已有的直流电源控制装置和正在研制的变频调速装置而提出的,具有前瞻性和先导性的作用。为深入研究可逆整流器特性和实现其控制奠定了理论基础。但要实现装置的产品化,系统主电路和控制参数的优化,逆变侧电流PI参数自整定,以加快系统的响应速度的问题,还有待于从理论和实验上做进一步的研究和分析。
本文关键字:暂无联系方式电工文摘,电工技术 - 电工文摘






