自1980年日本学者a.nabae等人在ieee工业应用年会上提出三电平中点箝位式结构以来,三电平逆变器便成为大容量、中高压电机调速的主要实现方式之一,作为其核心技术的脉宽调制(pwm)方法中,目前最受重视的是电压空间矢量脉宽调制法(svpwm)[1、2]。svpwm优越性表现在:在大范围的调制比内有很好的性能;无需大量角度数据;母线电压利用率高;物理概念清晰;算法简单且适合数字化方案;适合于实时控制[3]。因此这种控制方法是中外大功率变频产品中使用最为广泛的一种,也是三电平逆变器研究的热点问题。
空间矢量的产生是svpwm的关键环节,目前芯片制造商已经为两电平逆变器开发了专用的dsp芯片,可以方便的实现两电平逆变器的空间矢量产生功能。多电平逆变器由于开关器件和电平数的增加,矢量产生的复杂程度远大于两电平逆变器,当前还没有支持多电平逆变器矢量产生的专用dsp芯片,所以为多电平逆变器寻找一种简便且通用的空间矢量发生方法是研究者关注的问题。参考文献[4]提出了一种svpwm优化算法,该算法无需开平方和反正切等复杂运算,只需将参考矢量转换到60°坐标系,再经过简单的算术运算即可算出各基本矢量的作用时间。笔者在此基础上,试图改进一种易于dsp实现的三电平空间矢量脉宽调制优化控制算法,使得原本复杂的矢量发生变得更为简单些。
2 三电平逆变器的特点和基本原理
所谓三电平逆变器是指逆变器的交流侧的每相输出电压相对于直流侧的电压有三种取值的可能,即正端电压(+ ed/2)、负端电压(-ed/2)和中点零电位(0),二极管箝位式三电平逆变器的拓扑结构如图1所示。

图1 二极管箝位型三电平逆变器
它由2个输入电容,12个开关管,12个续流二极管,6个钳位二极管组成。2个输入电容c1,c2均分输入电压ed,每个电容上的电压为ed/2,由于箝位二极管的作用,每个开关管在关断时所承受的电压为电容电压即ed/2,因此三电平逆变器可以在不增加器件耐压等级的情况下成倍的提高输入电压。另外根据三电平逆变器的定义,逆变器的每相桥臂的4个主开关管有3种不同的通断组合,对应3种不同的输出电位,即+ed/2,0,-ed/2 ,用符号相应地表示为p,o,n三种。以a相为例,为了保证每个功率器件在关断状态承受ed/2电压,则在a相状态变化时,应该通过中性点电位0的过渡,即每相电位只能向相邻电位过渡,不允许输出电位的跳变。另外对主开关器件控制脉冲是有严格要求的,以防止同一桥臂贯穿短路,即:t1与t0、t2与t4的控制脉冲都要求是互反的,同时每一对主开关器件要遵循先断后通的原则。
在三电平控制系统中,每相的开关状态均有p、o、n三种,对三相对称系统来说共可以组合成33(27)种开关状态,而每一种开关状态对应一个电压空间矢量,因此三电平逆变器电压空间矢量共有27个不同的矢量组成,如图2所示。
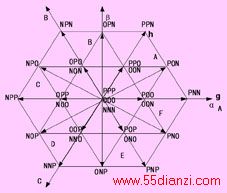
图2 三电平逆变器的空间电压矢量分布图
图2中所有空间矢量可以分类为零矢量、小矢量(内六边形的顶点)、中矢量(外六边形边的中点)和大矢量(外六边形的顶点),6个大矢量将矢量空间分为a~f六个扇区,在每一个扇区中又由其包含的各矢量的顶点组成四个小区域,共得到24个小区域。将27个空间矢量进行从abc坐标系到αβ坐标系解耦分析:
通过计算得到这27个矢量在αβ坐标平面中的矢量,将重复的矢量合并可以发现在αβ坐标系中只有19种不同的矢量,为了简化计算将所有桥臂矢量的模除以ed/3。
再计算可以得出αβ坐标系中每个特定电压矢量的α、β坐标都不是整数,这对采用数字控制的实时计算十分不利。
3 三电平逆变器svpwm优化算法分析
由于αβ坐标系中每个特定电压矢量的α、β坐标都不是整数,因此我们对αβ坐标系中的电压矢量再来重新做一次坐标变换,让 g轴与α轴重合,h轴由g轴逆时针旋转60°后得到gh坐标系。
如图3所示,在第a扇区中三电平的基本空间矢量就变为(0,0)、(1,0)、(2,0)、(0,1)、(0,2)、(1,1),这样在新的坐标系统中原来的空间电压矢量可以用坐标来表示,其中坐标均为整数点,有利于控制器在线计算。
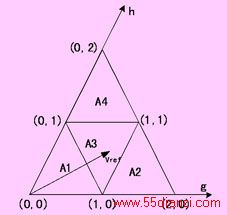
图3 新型算法坐标变换图
3.1 基本空间电压矢量的预处理
图4为新坐标系下的vref*投影图,根据参考电压vref*在g轴和h轴上的投影,分别设为vg和vh,那么容易得到:
(vref*为参考矢量的幅值vref*和其它坐标的关系可以由余弦定理得到)

图4 新坐标系下vref投影图
3.2 区域判断和最近3个基本电压矢量的确定
在知道参考矢量在gh坐标系下的坐标vg和vh后,很容易根据附表的条件判断其三角形区域和最近3个基本电压矢量。
3.3 计算被选择的基本矢量各自的作用时间
设由上一步选择好的3个临近的基本矢量为(g1,h1),(g2,h2),(g3,h3),它们对应的作用时间分别为t1,t2,t3,将选择好的基本矢量用于伏秒平衡方程组,通过计算可以得出如下3个基本电压矢量的作用时间: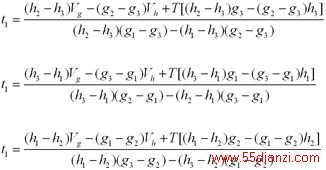
由于他们相互之间只相差0或者1,所以相对于αβ坐标系矢量作用时间的计算运算量得到很大的简化。
3.4 输出电压矢量的作用顺序
在确定了进行合成的基本电压矢量和各个矢量的作用时间之后,还必须确定3个基本电压矢量的作用顺序,在这个环节上遵循以下原则:
(1)为了优化开关频率,开关矢量应选择每次开关矢量变化时,只有一个开关函数变动(即只有一相输出发生变化),从而减少开关损耗;
(2)为了控制的方便实现,在一个开关周期中,开关矢量的选择是对称的;零矢量或者等效零矢量的作用时间是等分分配的。
以a扇区为例,该空间被分为4个三角形区间,按照前面的规定原则,同时根据电压空间矢量调制理论可知:在一个开关周期内开关矢量应该是对称的,这样输出谐波最小。图5是一个a扇区矢量分配顺序图,各电压矢量按节拍的分配用三相开关状态码表示。从图5中可以看到,参考电压矢量无论落入a1~a4哪个小区域,都由最近的三个矢量来合成替代,其中有一对小矢量如a2中的onn/poo算做同一个矢量,首尾矢量ooo是作为矢量链条的链结。

图5 a区电压矢量顺序
其它五个扇区电压矢量分配顺序的生成与a扇区类似,本文限于篇幅不加赘述。具体实现时,可以先将各个区域的电压矢量分配顺序制成表格存于dsp内,然后用查表的方法实现信号的发送,dsp实现脉冲输出功能。
4 实验仿真
采用tms320f2812dsp以及以dsp为核心的电路板组成,这里dsp主要实现系统的初始化和脉冲输出功能,用matlab/simulink仿真验证上述 svpwm 算法的正确性。
系统仿真参数设置如下:选用三相异步鼠笼电机,额定功率pn=4kw,额定线电压un=400v,额定频率fn=50hz,额定转速ωr=1430r/min,定子电阻rs=1.405ω,转子电阻rr=1.395ω,定子漏感lsl=0.005839h,转子漏感lrl=0.005839h,定转子互感lm=0.1722h,转动惯量j=0.0131kgm2,极对数p=2,开关频率f=10khz,直流母线电压vdc=600v,直流侧电容c1=c2=1200μf,磁链幅值给定|ψs*|=0.8wb。
本文关键字:逆变器 电工文摘,电工技术 - 电工文摘






