1 引言
电力系统中的故障大多数都是输电线路的故障。因而确保输电线路正常运行就成为非常紧迫的课题。故障位置的确定对电力系统的经济运行和电能的输送、质量都是极其重要的。永久性故障位置的确定有助于及时排除故障和恢复供电,瞬时性故障的精确定位对预防性维护有利。及时准确的故障定位可以减少维修时间,进而提高系统稳定性。
串联补偿在长距离输电线路中广泛应用以提高线路传输容量,它还具有提高系统暂态稳定性,优化输电线路潮流和降低系统损耗的作用。串补电容器设计和应用中考虑到串补装置的过电压保护,普遍采用了具有非线性伏安特性的MOV。由于非线性MOV的存在,使得常规的故障定位方法不适用于串补系统。故障的发生造成MOV的动作,故障定位算法必须计及故障时串补及其保护装置的状态,才能实现准确的定位。
目前有许多关于串补线路故障定位的研究。如通过估计得出串补上的电压降,将其用于串补系统故障定位和继电保护研究[1];使用两个子程序来分别计算串补前后的故障点,然后选择正确的结果[2]。两者都使用了集中参数输电线路。以上都属于单端故障定位,利用单端数据的测距算法不受通信技术条件的限制,但原理上很难克服对侧系统运行方式对测距精度的影响。文[3]是基于双端故障定位,但是它的信号需要双端同步。而实际上,由于存在种种困难,信号的同步很难做到。
2 串补模型
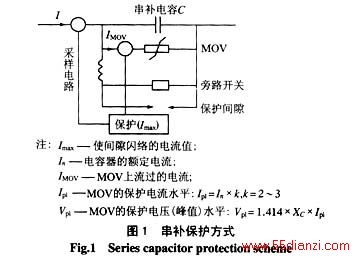
串补的过电压保护对故障定位和串补线路保护有重要的影响。目前,各国大都采用MOV作为串补装置的主保护。
图1给出了一个典型的串补装置的保护方案[1] 。
当加在串补上的电压超过一定的电压水平Vref, MOV开始作用。
MOV的伏安特性可以用单指数或者多指数模型来模拟。单指数模型如下式 ![]()
式中 Imax和Vpl的定义如图1。a一般为30~50。
MOV吸收能量,通过过载保护防止MOV过热损坏。在MOV过热时,间隙闪络,旁路MOV。多指数模型则是将MOV的伏安特性曲线分段用不同的指数函数来表示。不在此详述。
Goldworthy通过大量的算例计算,得到了一个可用于工频基波计算的串补电容器组和MOV组合模型[6]。
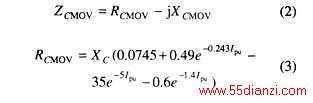
![]()
当
3 算法介绍
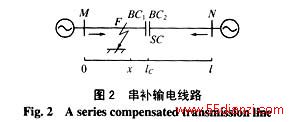
由于串补线路一般较长, 因而线路模型考虑了沿线分布的横向耦合电容,采用全分布线路模型。故障线路及其模型如图2所示。
(1)子算法1:假定故障在送端――串补段
这里需要得到故障后线路送端M和串补一侧BC1处的电压电流信号,通过受端N的电压电流信号,考虑串补装置的非线性特性,可以得到BC1处的信号,然后可以利用一般方法(本文采用牛顿拉夫逊法求解)得到故障位置x1。为了使信号同步化,引入首末端采样信号的相角差d。设输电
线路传递参数矩阵为,
x、lC、l含义如图2所示,M、N端电压、电流分别记为UM 、IM 、UN 、IN ,BC1、BC2处与此相同,由M、N端电压电流推导得到的F点电压电流分别记为UMF 、IMF 、UNF 、INF 。ZC为串补装置阻抗矩阵。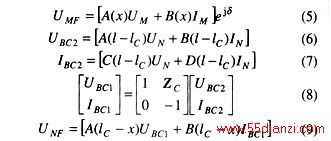
这里,有
采用牛顿拉夫逊法解非线性方程组,即可求得x1,d1。
(2)子算法2: 假定故障在串补――受端段采用与(1)相同的方法求取相应的x2,d2 。
(3)选取x的正解
由前面两个子算法可以得到两组不同解,需要从中选取正解。如果x1包含于 [0,lC],并且x2不包含于 [lC ,l],则选取x1作为正解。如果x1不包含于 [0,lC],并且x2包含于 [lC ,l],则选取x2作为正解。对于算法中,存在同时满足x1包含于 [0,lC],并且x2包含于 [lC ,l]的情况,求解中需要根据各序网中求得的解,比较得出正确的结果。
由算法的原理可知,本算法同样适用于串补位于线路的首端或末端的情况,这种情况相当于本算法的一个特例,同时也可用于同步信号的处理。由于本算法考虑了串补/MOV组合模型,因而能够更确切地反映串补系统的实际情况。
4 算法验证
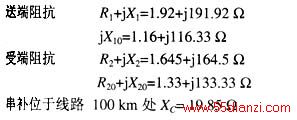
线路选取200 km长度的500 kV输电线路,串补位于线路的中点100 km处,补偿度为40%,计算时采用了不同的变换矩阵。计算结果如表1所示。
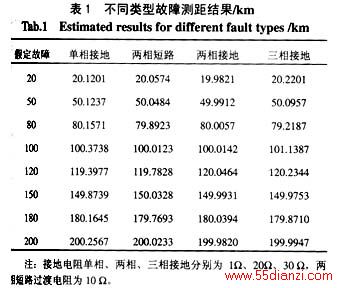
从计算结果可以看出,本算法具有较高的精度,对不同的接地电阻、故障类型同样适用。系统参数如下:

5 结论
串补输电线路由于串补装置中非线性元件MOV的存在,使得串补系统故障定位与常规输电线路故障定位有较大差别,故障定位算法必须考虑到非线性MOV的存在。
本文提出了一种适用于串补输电线路故障定位的精确算法。该算法的特点是:
(1)考虑了串补装置中具有非线性特性的MOV,更确切地反映了串补系统的实际状况。
(2)利用双端不必同步的电压电流数据,亦可用于同步数据。
(3)数字仿真证明该算法具有高精度和很强的适应性,可满足不同接地电阻,不同故障类型的要求。
参考文献
[1] Novosel D,et al.Algorithms for locating faults on series compe-nsated lines using neural network and deterministic methods [J].IEEE Trans.on PD,1996,11(4):1728-1736.
[2] Saha M M,et al.new accurate fault locating algorithm for series compensated lines [J].IEEE Trans.on PD,1999,14(3):789-797.
[3] Sadeh J,Hadjsaid N,Ranjbar A M,et al.Accurate fault LOCAIION algorithm for series compensated transmission lines [J].IEEE Tra-ns.on PD,2000,15(3):1027-1033.
[4] Novosel D,et al. Unsynchronized two terminal fault LOCAIION estim-ation [J].IEEE Trans.on PD,1996,11(1):130-138.
[5] 束洪春,司大军,葛耀中,等(Shu Hongchun,Si Dajun,Ge Yaozhong,et al).利用双端不同步数据的高压输电线路故障测距实用算法及其实现(Study on Practical Faule LOCAIION Algorithm for Two-Terminal HV and EHV Transmission Lines Using Asynchronous Data at Both Ends)[J].电网技术(Power System Technology),2000,24(2):45-49.
[6] Goldsworthy D L.A linearized model for MOV-protected series cap-acitors [J].IEEE PWRS,1987,2(4):953-957.
本文关键字:暂无联系方式电工文摘,电工技术 - 电工文摘






