摘要:应用自适应模糊比例积分微分(PID)控制理论及非线性寻优方法,结合电力系统实际情况设计了一种发电机励磁电压调节器。它能根据现场采集的数据以及给定的性能指标实现模糊参数、模糊规则实时自动调整,以期获得快速、优化的励磁调压控制。数字仿真研究结果表明,该调节器具有较强的自适应性和鲁棒性,控制效果比晶闸管励磁调节器要好,且能有效地改善系统的稳定性能。
关键词:发电机励磁电压调节器 自适应模糊PID控制 非线性优化
1 引言
随着电力系统的日趋复杂,规模的逐渐庞大,系统对各种电力设备的性能要求越来越高。各种电力设备不仅要不断改善自身功能,而且还要从整体考虑其对系统运行的影响。励磁电压调节器作为发电机的重要元件,它的性能优劣不仅直接影响到发电机机端电压的品质,而且对系统的暂态稳定性也有很大影响。目前现场采用的多数是比例式励磁电压调节器,它在暂态过程中虽然能起到一定的积极作用,但是响应速度慢,超调量大,暂态时间长。因此这些常规电压调节器已不能满足大容量机组的要求。
模糊控制理论的应用是当前的一个热点,它以能对非线性系统及无法建立精确数学模型的系统进行良好控制而受到广泛重视。但在设计控制系统过程中模糊规则的确定,多变量模糊控制的处理却是烦琐的。这些问题解决的好坏将直接影响到控制系统的品质。将模糊技术应用于电压调节器设计时问题更加突出。本文给出一种基于软件实现的自适应模糊(Fuzzy)PID发电机励磁电压调节器,通过与非线性寻优方法的有机结合,实现了在不同的系统运行状态下模糊规则、模糊参数的自动调整,使控制品质为最优。对单机无穷大系统仿真研究的结果表明,本文给出的励磁电压调节器具有一定的自适应性和鲁棒性,控制效果比晶闸管励磁调节器要好,并能有效地改善系统的稳定性能。
2 自适应Fuzzy PID控制器的设计原理
文献[2]给出了模糊自整定PID控制的一般性原理。本文根据具体问题的需要以及性能要求进行了修正,以期获得更为良好的控制效果。
自适应Fuzzy PID控制器实现的基本思想:
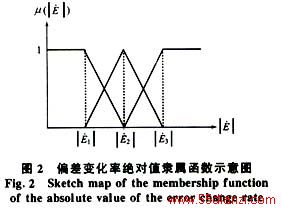
(1)首先以受控对象的参数与其参考值的偏差绝对值|E|和偏差变化率绝对值|

|为输入变量,建立隶属函数如图1、2所示。其中|Ei|(i=1,2,3)分别表示偏差绝对值的大中小,|

|(i=1,2,3)分别表示偏差变化率绝对值的大中小。其值在文中并未指定,而是通过优化方法进行实时调整得到的。

(2)假定|E|与|
|有如下5种状态组合
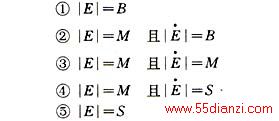
式中 B、M、S分别表示大、中、小。
与文献[2]不同的是,每种状态的隶属可度用下式计算

在此引入了修正因子αi(i=1,2,3),它们的大小表征各隶属度对偏差和偏差变化率的权重。通过调整αi,就可实现对控制规则的调整,从而增强系统对工况变化的适应性 ,改善控制品质。

考虑到变量的大中小相对于不同工况的意义是不同的,故本文与文献[2]不同,KPj 、KIj和KDj均按实时自调整得到的|Ei|及|
|(i=1,2,3)并结合优化方法进行在线调整;
3 自适应Fuzzy PID励磁电压调节器设计
自适应Fuzzy PID发电机励磁电压调节器的设计过程与以上类似,不同的是需根据电力系统的实际情况以及对调节器的性能要求来确定优化所需的性能指标,从而可通过寻优自动得到调节器设计中的未知参数αi、|Ei|和|
|(i=1,2,3)。现将其第n步设计过程叙述如下:
(1)确定调节器参数初值
在实际电力系统运行中,发电机机端电压偏差很难超过±20%,故可试取|E3|=0.2 ;又机端电压偏差±5%属于正常运行范围,故试取|E1|=0.05;但是电压调节器的其他参数很难凭经验确

实际上所有参数均未确定,最后都是经过单纯形法寻优得到。
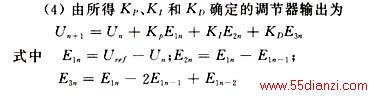
(2)确定KPj、KIj和KDj(j=1,2,…,5)
对于第一种状态,令励磁电压为uf,机端电压为uG,则

2,3)分别与KP1、KI1和KD1相对应。
为确定Ki(i=1,2,3),建立性能指标

运动方程以及网络方程而得到的机端电压估计值。那么min f(K1,K2,K3)的解就是对应于第n次采样所得到的Ki(i=1,2,3)值,即KP1、KI1和KD1。
与上述过程类似,可得到其余4种状态下的对应于第n次采样的KPj、KIj和KDj(j=2,…,5)值。
(3)确定αi、|Ei|和
为使自适应Fuzzy PID电压调节器具有良好的控制效果,必须合理地调整αi、|Ei|和
。再次应用单纯形法来确定各参数。为获得更好的控制品质,本文对文献[1]所提到的性能指标进行了修正,如下式
[1] [2] 下一页
本文关键字:调节器 发电机 电工文摘,电工技术 - 电工文摘






