摘 要:在研制复杂大功率电力驱动系统的过程中,实际测试前采用虚拟实验平台对控制器的中断延迟、计算速度、内存、接口、通信等瓶颈和瑕疵进行排查,可缩短开发周期,降低开发费用和技术风险。该文依据实际电力驱动系统结构,提出离散事件变流器系统与连续时间电机系统解耦的实时仿真框架,并基于Simulink开发电力驱动系统实时模型库;采用dSPACE实时仿真环境生成模型的实时C代码,基于两定时器任务实现交流驱动系统15~20 μs步长实时仿真。实时仿真系统具有与实际系统的实时硬件接口,可以与实际控制器或实际电机系统直接相连,构成硬件在回路仿真测试或快速控制原型系统。在一般的实验室中可以对大功率电力驱动系统进行测试、教学和操作培训。
关键词:驱动系统;硬件在回路仿真;快速控制原型
交通和工业领域对大功率电力驱动系统的需求日益增大,系统控制和保护功能愈来愈复杂,基于CAN或其它类型的现场总线分布控制系统的应用也日益普遍。在研制大功率和复杂的电力驱动系统的过程中,必须对其数字控制器进行充分的测试和参数整定。在完全消除控制器硬软件错误之前,就直接使用实际系统进行测试是不合适的。
目前,在电力驱动系统的调试中,经常使用的仿真系统多为离线的,这些仿真系统虽然对控制算法、量化误差、编程和编译错误的测试是有效的,但是不能用于实时系统的中断延迟、执行时间、内存使用和硬件接口等瓶颈与瑕疵排查。此外,离线仿真也无法对分布控制系统的数据传输和增量编码器信号进行仿真。
解决上述问题的途径之一是采用实时仿真系统,即将实际逆变器-电机-传感器代之以其实时模型,与实际控制器构成闭环测试系统。由于该实时仿真测试系统回路中具有实际控制计算机及接口硬件,因而被称为硬件在回路仿真(Hardware-in-the-Loop Simulation) 测试,简称HIL。与HIL不同的另一种实时仿真系统是快速控制原型 (Rapid Control Prototyping) ,简称RCP。RCP采用控制器实时模型与实际电机系统构成闭环控制回路,以实现控制系统的快速生成。
尽管实时仿真技术已被汽车、航空工业视为技术开发规范,但用于电力驱动系统的研究和开发尚处于起步阶段。目前,国际上仅有少数公司,成功地把HIL测试用于牵引电力驱动系统的综合测试[1]。电力驱动系统实时仿真的主要困难在于,离散事件的逆变器系统与连续时间的电机系统耦合引发仿真系统变因果和变结构特性,而且系统的仿真步长要求太短。
本文根据电力驱动系统的结构与运行特点,提出离散事件逆变器系统与连续时间电机系统解耦的实时仿真框架,建立基于Simulink的电力驱动实时模型库,并在dSPACE实时环境中实现异步电机、永磁同步电机(PMSM)和无刷直流电机驱动系统的实时仿真。结果表明,采用本文提出的方法,可以实现电力驱动系统的15~20 µs级的实时仿真。
2 电力驱动系统实时仿真框架
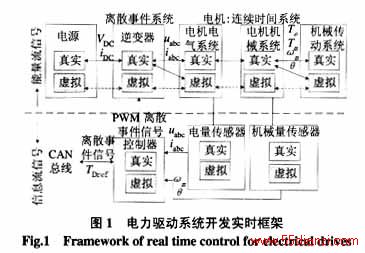
依据电力驱动系统开发的HIL与RCP两大技术要求,本文提出了图1所示的实时仿真框架。在每一种系统组合,都有硬件的介入。考虑系统的物理结构特点,采用层次化、模块化的建模和试验方法,这有助于处理复杂问题,实现子系统模型的复用。电机可以是异步电机、永磁同步电机(正弦波)、无刷直流电机(梯形波)。
由于目前数字计算机处理速度的限制,尚不能实现亚微秒级物理模型实时仿真,因此需要对逆变器开关动作进行理想化处理,用一组离散事件表述。离散事件逆变器
本文关键字:暂无联系方式经验交流,电工技术 - 经验交流






