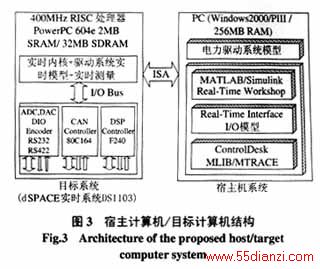
Real-Time Interface (RTI)是dSPACE系统的实时实现软件,它对实时C代码自动生成软件Real-Time Workshop进行扩展,无缝地集成了dSPACE系统的实时内核和I/O硬件模型,实现由Simulink模型到dSPACE系统实时C代码的自动生成、编译、连接、下载和执行[8]。RTI还根据信号和参数产生一个变量文件,由dSPACE的试验工具软件ControlDesk [9] 对变量进行实时访问和参数调整。
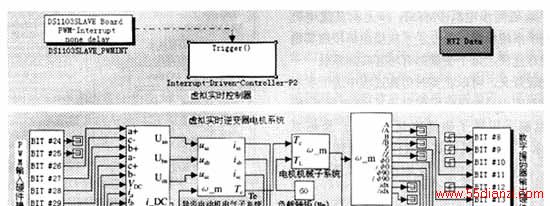
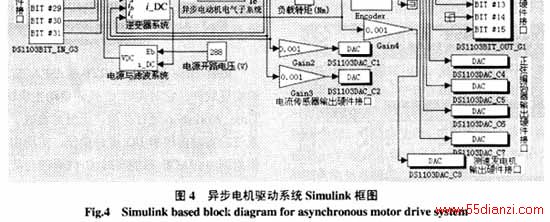
在功能强大的实时代码实现软件RTI与界面友好的试验软件ControlDesk支持下,可以很快地实现电力驱动系统快速控制原型或硬件在回路仿真闭环测试。采用本文开发的电力驱动系统模型库与dSPACE 硬件模型库,可快速地组建实时闭环系统。图4是采用上述方法组建的异步电机驱动系统Simulink框图。
图4的下部是逆变器-异步电机-传感器系统模型,作为实时任务T1,模型具有与实际控制器的硬件接口,可输入6路PWM开关逻辑信号,输出电流、电压等模拟信号,以PowerPC 604e的定时器A作为采样定时;上部是控制器-传感器接口模型,作为实时任务T2,模型采用DSP控制器F240硬件产生实时PWM信号,并以PWM信号作为控制器的采样定时。
控制器与逆变器-电机模型通过硬件接口实现闭环,T1与T2以异步采样模式工作,构成两定时器任务系统 (图5)。为减少对控制器输出信号采样引发可变延时而造成抖动影响,设置T1的采样速率远高于T2的采样速率。
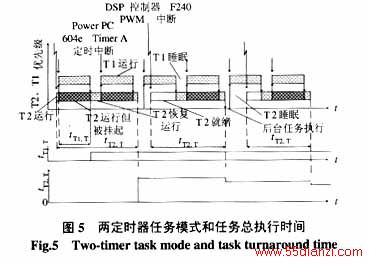
实时仿真系统试验针对异步电机矢量控制系统,其中逆变器参数:PWM开关频率fPWM=2 kHz,防止同一桥臂开关管直通的死区时间为7 µs;电源与滤波参数:电源开路端电压Ebo=288 V,电源内阻Rb=0.03Ω,滤波电容C=10000 µF;电机参数:180 V,122 A,50 Hz,45 kW,2900 r・min-1。实时仿真采用欧拉数值积分方法(ODE1) ,T1采样周期Ts=15µs,T2采样周期Tc=PWM周期=500 µs。转速及三相电流控制都是采用带限幅与抗积分饱和的数字PI调节器。
图6是异步电机驱动系统在转速=0~100 rad/s突变时的相电流ia、转速ωm、电磁转矩Te和转子磁链空间矢量ψr矢端轨迹的实时仿真结果。任务T1的总执行时间tT1, T为7~9 µs,其脉动幅值等于任务切换时间tTS= 1.35~2.7 µs;任务T2由于被任务T1频繁中断挂起,总执行时间tT2, T脉动较大,为16~28 µs。
实时仿真系统长时间连续运行,没有发生数值不稳定问题。对永磁同步电机矢量控制系统
本文关键字:暂无联系方式经验交流,电工技术 - 经验交流






