一、传感器作为输入
迄今为止,机器人最常用的输入是传感器,从极简单者到极复杂者。所有的传感器都有一个目的:为机器人提供它可以使用的数据,以作出聪明的决定。例如,温度传感器可以帮助机器人决定继续工作下去是否太热。或者,“能量钟表”机器人可能会记录下整个房间内它走过的地方的温度,寻找温度变化大的地方(表明该处有能量泄漏)。
1.传感器类型
从大的方面来说,传感器有两种类型,如图所示。

■数字传感器提供通,断或真/假的结果。开关是数字传感器的好例子:开关不是断开就是闭合。
■模拟传感器提供一个范围的许多数值,通常是电压。在许多情况中,这种传感器提供可变的阻值或电流,然后由外部电路转换成电压。例如CdS(硫化镉)电阻的电阻值在光的照射下发生剧烈改变。在配上一个固定电阻的简单电路中,硫化镉电阻用来输出一个可变的电压。
无论是数字还是模拟传感器,最后的输出都是电压,可以馈送给计算机、微控制器或其他电子器件。在数字传感器方面,机器人电路感兴趣的只是电压属于逻辑“低”(通常为O伏)或逻辑“高”(通常为5伏)。所以,数字传感器往往不需附加的接口电路,可以直接连到机器人控制用的计算机。
在模拟传感器的情形中,可变的电压电平必须由附加的机器人电路转变成适合控制计算机使用的形式。这一般需要使用模数转换器,本章在后面将会详述。
2.传感器实例
制作机器人的一大乐趣是考虑它们采用哪些新方法来对环境改变作出反应。现在有许多很便宜的传感器,因而这种事做起来很容易。新传感器还层出不穷,而且与最新的发展保持同步。
对于业余爱好者的机器人制造师来说,不是所有的新颖传感器都是买得起的——您要买1万多美元的视觉系统,那等于白日做梦。但是,价廉物美的其他传感器多的是,许多还只售几美元。
本讲座将在以后讲述了适合于机器人应用的许多不同类型的常用传感器。下面的简介是要暖暖您的胃口。
■声纳测距器。它利用反射声波来判断距离。它的有效测量距离大约是1英尺到30~40英尺。
■接近或运动声纳。利用反射的声波来判断机器人是否在接近物体(即所谓“接近检测”)。人、狗等的运动会使反射的声波发生改变,同样可以检测出来。其测量范围为0英寸至20~30英尺。■红外测距器或接近度感知器。
利用反射的红外光来确定距离和接近度。检测的距离一般为O英寸至2或3英尺。
■光检测器。各种光检测器能够检查出有无光线。当光检测器成组(称为“阵列”)使用时,它们可以检测出有无图案。由数千个光敏元件组成的阵列型光检测器(如CCD摄像机)可以用来作为机器人的眼睛。
■热电红外检测器。热电红外检测器能检查出热影像的变化,经常被用作运动检测器。检测的距离为O至300英尺或更远。
■语音输入或语音识别。您的声音和讲话可以用来给机器人发命令。
■声音。机器人能够检测音源。
您可以调节机器人,使它只听某些声波长或高于某一音量的声音。
■接触开关。接触开关被用作“触摸传感器”。当这些开关被触动时,便表示机器人接触到某些物体。
■加速计。它用来检测速度的变化和/或地球引力的变化。加速计可以用来确定机器人的活动速度或偏离其中心是否达到危险程度。
■气体或烟雾检测器。气体或烟雾检测器可以查出有害气体或有毒烟雾是否达到危险的程度。
■温度传感器。温度传感器可以查出环境或外加的热量。环境热量是房间或空气的热量;外加热量是直接加到传感器上的某些热源或冷源。
二、电机和其他输出
机器人利用各种输出来作出一些身体反应。最经常的做法是把一个或更多的电机作为机器人的输出,使机器能够运动。在活动机器人上,电机驱动车轮,使机器人可以在地面上活动。在静止机器人上,电机被安装在手臂和手掌机构上,使机器人可以抓住和操纵物体。电机并不是为机器人提供活动能力的唯一手段。机器人可以利用螺线管绕桌子踊跃,或利用泵和阀门给气动或水流动压力系统提供动力。不管机器人使用什么系统,基本概念都是相同的:
机器人的控制电路(如计算机)把电压送到输出端,去接通电机、螺线管或泵。当电压撤除时,电机之类的执行装置停止动作。
其他的常用输出类型其他的输出类型用于以下目的:
■声音。机器人可以发声来警告您注意面临的危险或者恐吓入侵者。如果您已建造了R2-D2之类的机器人,那么机器人可能用瞅声和噗噗声与您交流。但您仍能听懂它讲的意思。
■话音。合成的或录制的话音使机器人能够以更像人的方式进行交流。
■视觉指示。利用发光二极管( LED)、数值显示器、或液晶显示器( LCD)之类的视觉指示帮助机器人以直接的方式与您交流。
考虑功率需求机器人的输出通常是驱动重负载:电机、螺线管、泵、甚至于大音量的声音,因而需要很大的电流。典型的机器人控制计算机不能在任何输出端提供大于15—22mA的电流。这只够点亮一个或两个LED,但远不足以满足其他需要。
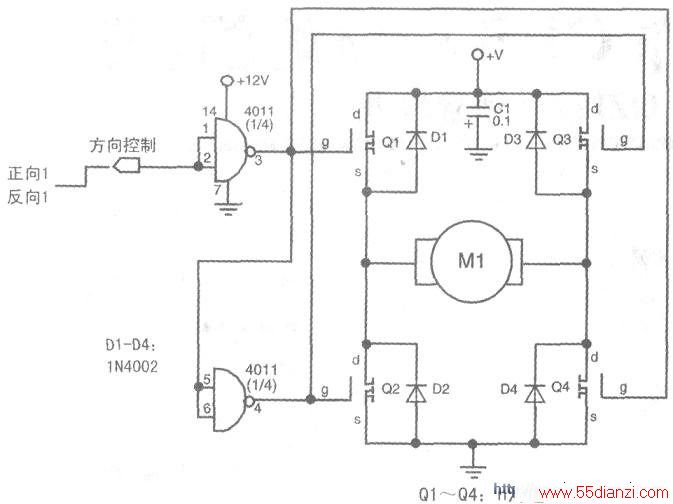
为了用一个输出端驱动负载,必须增加一个大功率元件以提供适当的电流。这样的功率元件可以是一个晶体管这么简单;也可以是现成的功率驱动器电路,它能够驱动很大马力的大型电机。一种常见的功率驱动器是H电桥,这种叫法来源于其中所用的多个晶体管以电机或其他负载为中心组成“H”形线路(请参阅“直流电机工作原理”,可更深入了解H形电桥)。H电桥可直接连接机器人的控制计算机,以便向负载提供合适的电压与电流。
三、输入与输出结构
机器人的体系结构需要模式设定或传感器之类的输入以及电机控制或语音之类的输出。如您所知,计算机或微控制器的基本输入和输出是两态的二进制电压电平(断和通).通常为0伏和5伏。两类接口用来把这些HIGH/LOW(高/低)数字信号转换给机器人的控制计算机,它们是并行接口和串行接口。
1.并行接口在并行接口中,利用8根线每次传输多位的数据。并行接口能够在较短的时间内传输更多的信息,因而并行接口的速度高。它每次发送整个字节(8位)的数据。在打印文本时,每个字节代表一个不同的字符如A或8。这些字符可以用不同组合的8位数据来表示。
2.串行接口并行接口的缺点是耗用了机器人计算机或微控制较多的输入/输出线。
控制计算机的外接线(I/O线)很有限,一盘为1 6根或更少。如果机器人使用两个8位的并行口,就没有什么I/O线可供他用,另一方面,串行接口只用一根线来传输数据,因此节约了I/O线。串行接口的工作方式是把一个字节分成一个个的位,然后以一个文件的方式把每个位沿线路发送下去。串行接口有许多种方案,分别使用1、2、3或4根I/O线。
另外的I/O线被用于在数据的发送方和数据的接收方之间进行定时和协调等。
机器人可用的许多传感器都有串行接口,从表面上看串行接口似乎比并行接口不太好用。但事实上并非如此,如果硬件和软件严格配合的话。在您可以使用来自传感器的串行数据之前,您必须先拆分出所有的位,然后把它们组装成8位或16位数据,用它来代表某种有意议的数值(如传感器与某个物体之间的距离)。重组串行数据会比较容易,如果您使用计算机或微控制器的话,因为在控制计算机里有您所需的软件替您做一切工作。例如.BasICStamp lI只需一条命令就可做好这项工作。在本书的余下几章中,您会学会机器人的计算机和其他电子控制电路的更多知识。
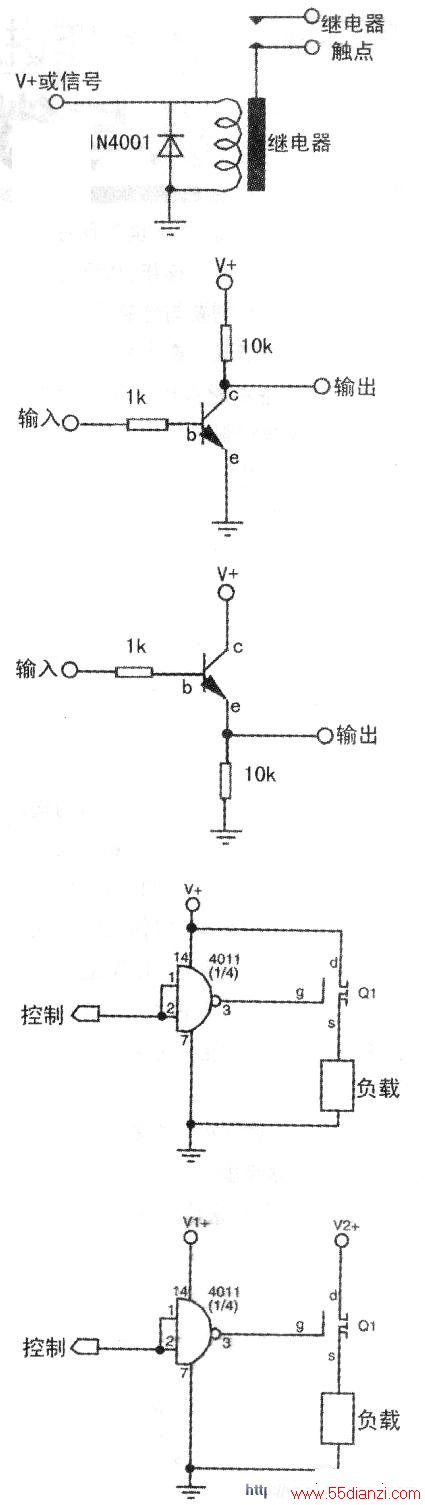
四、输出接口
如前所述,大多数输出电路要求比机器人的控制电路(计算机、微处理器、微控制器)所能提供的还要大的电压和电流。所以,您需要某种形式的功率驱动器,以便把控制电路提供的0/5伏(断/通)信号转变成输出所需的电流和/或电压电平。
下图各种具体的实现方功率晶体管、分立元件H电桥、单一封装的H电桥和缓冲器电路。
上一篇:液晶屏接口及驱动电路简介






