串行口的数据传送可采用查询方式,也可采用中断方式,无论哪种方式,都要借助于TI或RI标志。
在串行发送时,通过查询Tl的状态确定发送。
只要TI为O就继续查询,TI为1就结束查询,发送下一帧数据。也可以等发送完一帧数据后,TI自动置位引起中断申请,然后在中断服务程序中发送下一帧数据。
在串行接收时,通过查询Rl的状态确定接收。
只要RI为0就继续查询。RI为1就结束查询,接收下一帧数据。也可以等接收完一帧数据后,Rl自动置位引起中断申请,然后在中断服务程序中接收下一帧数据。
无论采用什么方式。在开始通讯之前,都要先对控制寄存器SCON进行初始化。
所以我们只要在上次的跳舞小车的程序中加上串口通讯程序就可以了,而且上次只用的是定时器0,这次加上定时器1,正好不冲突。首先在主程序开始的初始化设置中加上串口通讯控制字的设置。

然后,其他查表找音符,确定定时器初值的程序不变。只在控制小车动作的语句后面加一句,控制串口同时发送动作数据。

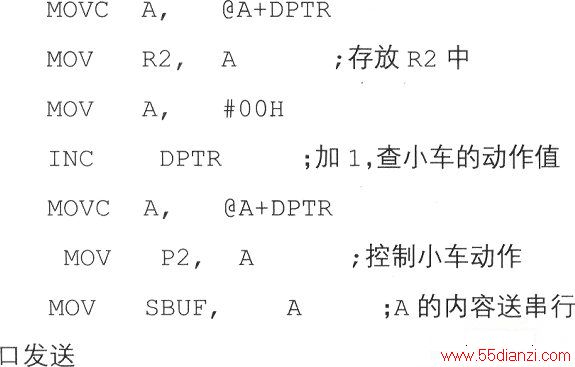
最后写上中断处理程序

舞小车的接收和上面的一样,变化不大,只是用了中断方式就行了。也分两部分,首先是设置串口通讯的控制字。
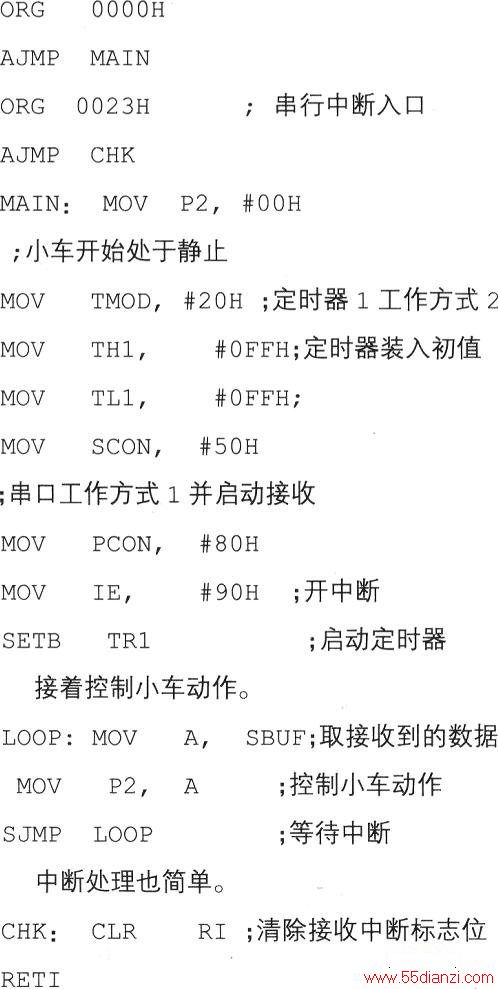
最后程序结束:END。
上一篇:用C语言的伴舞机器人串口通讯程序






