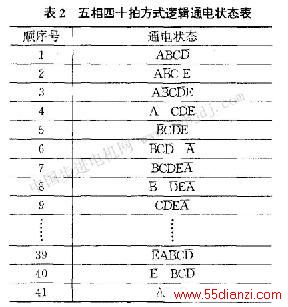
 5实验举例
被试电动机是一台90BYG5200D型五相混合式高分辨率步进电动机(由杭州哈杭电伺服技术研究所生产)。基本技术数据为:
相数: m=5
相电流: I=8A
保持转矩: TR≥10Nm
牵出转矩: Tp.0≥8Nm
空载起动频率: fto≥5k脉冲/s
绕组: 五相星接
图4表示被试电动机的最大静转矩特性。试验用的驱动器基本上是一台SMD一50610型的驱动器(杭州哈杭电伺服技术研究所生产),作了一些改造,以便利于步距角的改变。采用五相星接桥式驱动,系。PWM升频升压型,在全导通频率(fo)以前,功放级电压随频率增高而上升。控制脉冲频率超过fo后,功放级电压基本不变,系60V单相交流电源整流滤波后提供的。
5实验举例
被试电动机是一台90BYG5200D型五相混合式高分辨率步进电动机(由杭州哈杭电伺服技术研究所生产)。基本技术数据为:
相数: m=5
相电流: I=8A
保持转矩: TR≥10Nm
牵出转矩: Tp.0≥8Nm
空载起动频率: fto≥5k脉冲/s
绕组: 五相星接
图4表示被试电动机的最大静转矩特性。试验用的驱动器基本上是一台SMD一50610型的驱动器(杭州哈杭电伺服技术研究所生产),作了一些改造,以便利于步距角的改变。采用五相星接桥式驱动,系。PWM升频升压型,在全导通频率(fo)以前,功放级电压随频率增高而上升。控制脉冲频率超过fo后,功放级电压基本不变,系60V单相交流电源整流滤波后提供的。
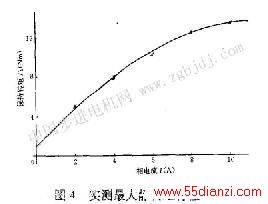 图5和图6给出了4种不同步矩角时实测的牵出矩频特性。为了便于比较,横轴(频率)的尺标对不同步距角的曲线取不同的值,同时给出了相同的转速尺标。不难看出,牵出特性如果用牵出转矩和转速的关系表示,则不同步距角时的特性差别不大,或者说基本上可以用一条统一的矩速特性表示。
图5和图6给出了4种不同步矩角时实测的牵出矩频特性。为了便于比较,横轴(频率)的尺标对不同步距角的曲线取不同的值,同时给出了相同的转速尺标。不难看出,牵出特性如果用牵出转矩和转速的关系表示,则不同步距角时的特性差别不大,或者说基本上可以用一条统一的矩速特性表示。
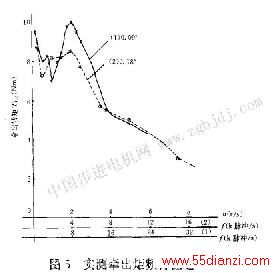 应说明,对于升频升压型驱动器,在改变逻辑通电方式实现不同步距角运行时,升频
升压的规律需同时调整,主要表现在全导通频率的不一样。实际上全导通频率对应的转速相同。测出图5和图6曲线时,fo对应的转速为2r/s,对应醢线(1)、(2)、(3)和(4),fo分别为8k脉冲/s、4k脉冲/s、2k脉冲/s和1.6k脉冲/s。
应说明,对于升频升压型驱动器,在改变逻辑通电方式实现不同步距角运行时,升频
升压的规律需同时调整,主要表现在全导通频率的不一样。实际上全导通频率对应的转速相同。测出图5和图6曲线时,fo对应的转速为2r/s,对应醢线(1)、(2)、(3)和(4),fo分别为8k脉冲/s、4k脉冲/s、2k脉冲/s和1.6k脉冲/s。
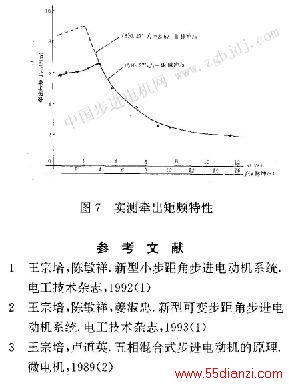
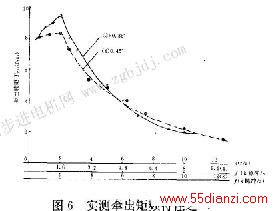 如果不按上述规律调整升频升压规律,牵出特性会不一样。例如,对于0.27。步距角的通电方式,对应于2r/s,工的值应为2.67k脉冲/s,牵出矩频特性大体上应如图7中曲线(6)所示。图7中曲线(5)是在f0=4k脉冲/s(对应于3r/s)的条件下测出的,由于电压
随频率上升得慢,在频率低于^的范围内转矩下降是在预料之中的。
如果不按上述规律调整升频升压规律,牵出特性会不一样。例如,对于0.27。步距角的通电方式,对应于2r/s,工的值应为2.67k脉冲/s,牵出矩频特性大体上应如图7中曲线(6)所示。图7中曲线(5)是在f0=4k脉冲/s(对应于3r/s)的条件下测出的,由于电压
随频率上升得慢,在频率低于^的范围内转矩下降是在预料之中的。
本文关键字:电动机 驱动电路及控制电路,单元电路 - 驱动电路及控制电路






