定位误差主要有以下5方面:超声波器件的形状和安装位置造成坐标系参考点和待测目标点的位置偏差;系统电路器件延迟产生的误差;小车是不断运动的,由于超声波传输速度比较慢,请求定位时刻到定位完成,小车已经移动了一定的距离;在不能连续检测到足够参考点信号时,位置的确定依靠前一时刻的测量,会造成累计误差;温度条件对超声波的影响。
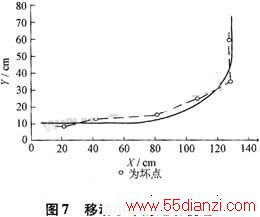
图7给出了在室温20℃、超声波速度为340m/s、小车2个轮子间距离为0.2 m、移动速度为0.2 m/s、平面二维定位实验测量的一段轨迹,实验通过对前3个方面误差补偿计算,使定位精度达到3 cm。
5 结束语
因为光电编码器测距定位依靠前一测量点的信息,必然导致定位误差的累积;而红外超声三边测距法是一种只依靠当前测量点信息的绝对位置定位方法。此系统综合了这2种方法,消除了累积误差,并解决了定位盲区的问题,对移动小车有一个较准确的定位。
上一篇:一种简易GPS定向仪






