为了对付现代战争的“四大威胁”,采用分布式、多制式传感器组网对敌方目标进行探测已经变得十分必要,而多制式传感器组网的关键技术之一是数据融合问题。分析了三坐标雷达、两坐标雷达和红外探测器这三种常见种类的传感器点迹几何模型,提出了一种针对这三种不同制式传感器的数据融合算法,并在某工程中得到了成功应用。
将不同制式的传感器采用分布式、组网探测的方式能够有效对付现代战争的“四大威胁”。在分布式组网探测系统中,通常采取如下方式进行处理:首先由各个探测器形成局部航迹;然后将航迹数据上报到上级情报中心;最后情报中心对各局部航迹进行数据融合得到一个次优的融合航迹。多种传感器的目标关联方法主要有两种方案,一种是测量一航迹关联方案;另一种是航迹一航迹关联方案。
本文在此分析讨论的航迹一航迹关联算法,适用于包含有三坐标雷达、两坐标雷达和红外探测器这三种传感器组成的分布式网络处理系统。在该分布式处理系统中,各个探测器先各自形成独立的局部航迹,然后将航迹数据上报到情报融合中心进行数据融合处理并最终形成融合航迹。情报融合中心数据处理的难点在于有三种探测器测量值形式各不相同,除三坐标雷达的局部航迹可以提供状态估计以外,另外两种传感器都仅能提供每条局部航迹对应的测量集。
1 模型建立与分析
下面以三种探测值的几何模型为基础定义测量一测量间的距离,在此基础上进一步定义了测量集一测量集间的距离,并作为航迹一航迹关联的定量度量。通过这种处理后,航迹关联问题被转化为了单纯的聚类问题。在状态估计上本文采用数据压缩方式。即先用极大似然估计法从相关的多个测量数据中估计出融合点迹中心,最后用卡尔曼滤波器组得出最终的融合航迹。
1.1 三坐标探测器点迹的几何模型
三坐标雷达的测向量为z=(r,θ,φ),其中r为斜距,θ为方位角,φ是高低角。三坐标雷达点迹测量几何模型如图1所示。
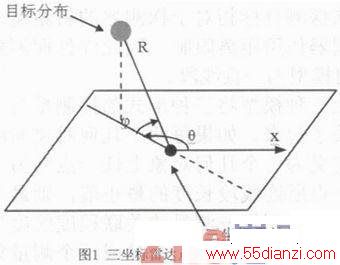
三坐标雷达的一次测量能够确定目标在z=(r,θ,φ)所代表的点的附近,因此其测量点迹的几何模型为一个点。
1.2 两坐标雷达点迹几何模型
两坐标雷达的测向量形如z=(r,θ,φ),其中r为斜距,θ为方位角。两坐标雷达点迹几何模型如图2所示。
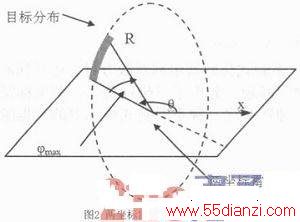
两坐标雷达只能探测到斜距和方位角,通过其测量只能确定目标在一个位于竖直平面内的半径为r的圆弧附近。并且受两坐标雷达高低角探测范围限制,所以两坐标雷达的测量点迹的几何模型为一段弧线。
1.3 红外探测器点迹几何模型
红外探测器则是测向量形如z=(r,θ,φ)。其中θ为方位角,φ是高低角。红外探测器点迹测量几何模型如图3所示。
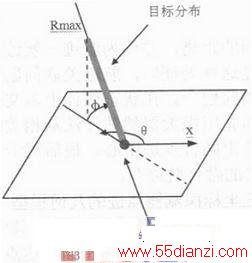
红外探测器可以准确探测目标方位角和高低角,但却无法探测目标相对于探测器的斜距离,并且受红外探测器作用距离限制。因此红外探测器的测量点迹几何模型为一直线段。
以上三种模型将三种形式的探测量与三种几何对象相关了起来。如果每两个几何对象问的最小几何距离定义为一个几何对象上任一点到另一几何对象上任一点所连线段长度的最小值,则最小几何距离就可以作为测量一测量的关联程度的度量。度量相似程度是为了确定两个测量或两个测量集是否来自于同一个目标。
通过分析,不难发现共有六种度量情况:1)点到点;2)点到弧线段;3)点到直线段;4)直线段到直线段;5)弧线段到弧线段;6)弧线段到直线段。其中,1)~4)种情况都很容易找到对应的数学公式直接求解;而对于5)和6)这两种情况,虽不能用简单的方法求解,但是可以通过最陡下降法等数值最优化方法求解。下面就以测量间的最小距离为基础,对两两测量集间的相似程度进行度量。
2 航迹关联算法
2.1 测量-测量相似程度的度量算法
测量-测量相似程度的最佳度量应该是两次探测间的统计距离。但由于存在非线性关系,真实的统计距离求取困难。而两次探测间的几何距离则容易求出。不同探测器在同一时刻对于同一目标的两个探测值之间的几何距离必定总是较小的,而对于不同目标的探测值之间的几何距离则不可能表现出这种特性。所以在较宽松的情况下,可以用以几何距离作自变量的某一函数作为近似的度量函数。
本文算法中,设来自两探测器在同一时刻对同一目标的两个探测值i和j间的几何距离为dij,假定dij符合方差为![]() 的某种分布,则定义归一化距离
的某种分布,则定义归一化距离![]() 作为测量一测量相似程度的度量。而σij的近似计算公式可表示为:
作为测量一测量相似程度的度量。而σij的近似计算公式可表示为:
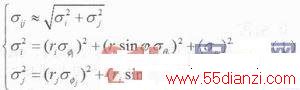
因红外探测器缺少距离量r,可用探测点迹对应直线段上取得最小距离dij的点的距离r’替代;因两坐标雷达缺少高低角量φ,可用探测点迹对应弧线段上取得最小距离dij的点的高低角φ’替代。红外的和两坐标雷达的σφ都取0。
2.2 测量集-测量集相似程度的度量算法
最简单的度量值就是测量集中对应测量相似程度的均值,即
其中:ei为两测量集中第i时刻测量间的归一化距离,N为当前时刻。

本文关键字:传感器 传感-检测-采集技术,电子知识资料 - 传感-检测-采集技术






