本文针对位置敏感探测器噪声来源及特点,提出了一种基于自适应FIR维纳滤波器的自适应抑制方法。该方法以维纳滤波器为数字滤波器,自适应地调整传输特性,提高PSD的信噪比,从而大幅提高了PSD应用系统的测量精度。
位置敏感探测器(Digital Singnal Processor,PSD)是一种基于横向光电效应、用于对入射光斑位置的连续变化进行测量的探测器,具有较高的灵敏度和宽的光谱响应范围,瞬态响应性能好、结构紧凑,PSD在精密尺寸测量、对接,震动测量、转角测量甚至三维形貌测量、机器人传感等领域都有广泛的应用。PSD虽然具有良好的性能,但对光源、环境温度、外部测量电路等均具有较高的要求,只有在一定的使用条件下,才能充分发挥其性能。针对PSD的这种要求,文中在分析了PSD的工作原理和结构后,详细说明了PSD的主要噪声来源,提出了基于位置敏感探测器的信号噪声自适应抑制方法。
1 PSD的结构和工作原理
PSD可分为一维PSD和二维PSD,通常采用PIN的3层结构,P层是光敏面,在光敏面的边缘位置设置信号引出电极,N层与反偏电极形成欧姆接触。当非均匀光照射到光敏面上时,将在入射点和引出电极之间产生横向电势。根据电极输出的光电流和电极间距可以计算出入射光能量重心的位置。对于一维PSD,其位置探测原理如图1所示。

当入射光斑照射在PSD表面上离中心x处时,在PSD的输出电极x1,x2上会有相应的光电流Ix1和Ix2输出,该光电流与光斑在PSD表面上的位置x有对应关系。光斑离PSD中心的位置x可由下式计算
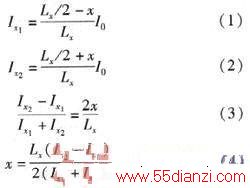
式中,Ix1和Ix2为从输出电极上流出的电流;I0=Ix1+Ix2为全光电流;Lx为PSD的有效光敏面长度。
2 PSD的主要噪声来源
2.1 测量电路噪声
电子系统内部噪声是影响PSD位置分辨力的一个重要因素,电路噪声越低,光电流越大,则位置分辨力越高。电路噪声主要包括反馈电阻的热噪声、运放的固有噪声和温度漂移等。在相同的反馈电阻下,电路的热噪声对测量电路总的噪声贡献不可忽视,因此在允许的情况下尽可能地降低电阻值。为减少运放对电路噪声的影响,应采用低噪声运放,AD823,AD704,OP07,OP1177的测量电路均具有较好的综合性能,但由于运放封装数量的原因,可以根据电路的规模进行选择,如对于一维PSD的测量可以选择双封装AD823或四封装的AD704。
2.2 光源、背景光及温度对PSD的影响
理论上讲,入射光点的强度和尺寸大小对位置输出均无关,但当入射光点强度增大时,信号电极输出的光电流也增大,有利于提高信噪比,从而提高器件的位置分辨率;通常PSD在使用时总存在一定强度的背景光,背景光的存在将影响器件的输出,消除背景光最简便的方法就是在PSD的感光面上加一个干涉滤光片,滤掉大部分背景光;环境温度的变化会影响器件的灵敏度和暗电流,这也会对PSD的位置分辨率带来一定影响。除此之外,光谱波长响应对PSD的具体运用具有较高的现实意义,对于特定的运用场合,设计PSD在特定的波段具有峰值响应,可以提高测试系统信噪比和测试精度。
3 PSD信号噪声自适应抑制方法
针对PSD的主要噪声来源及特点,提出了自适应噪声抑制的方法来提高PSD的位置分辨率。自适应噪声抑制属于自适应信号处理,不需要预先知道干扰噪声的统计特性,能在逐次迭代的过程中将自身的工作状态自适应地调整到最佳。该方法需要两块位置敏感探测器PSD1和PSD2 PSD1需要接受入射光斑照射,而PSD2不需要光斑照射,专门用来检测噪声源。自适应噪声抑制的原理框图如图2所示。
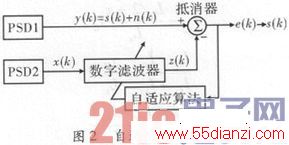
PSD2的输出经过参数可调的数字滤波器后,再送到抵消器,与PSD1的输出信号相减。插入滤波器的目的就是要补偿两片PSD的噪声差异,以使滤波器的输出尽量逼近PSD1感应的噪声。图2中的数字滤波器为参数可调的滤波器,自适应噪声抵消的其他环节也都以数字方式实现,所以图2中各变量的时间自变量都以取样序列号k来表示。
3.1 自适应滤波中的数字滤波器
自适应噪声抵消的核心部分是自适应滤波器,自适应滤波的过程就是用自适应算法调整数字滤波器的参数,以使滤波器输出z(k)逼近PSD1输出信号中叠加的噪声n(k),这样就可使抵消器的输出e(k)逼近被测信号s(k)。自适应数字滤波器主要包括有限冲激响应(FIR)横向滤波器和无限冲激响应(IIR)横向滤波器。由于IIR横向滤波器稳定性差,而且相位特性难以控制,这些缺点限制了它在自适应滤波和噪声抵消中的应用。FIR横向滤波器的结构如图3所示,其输入信号为x(k);输出信号为z(k)。图中z-1表示单位延时,延时线抽头出的信号分别为x(k),x(k-1),…,x(k-M+1),用向量可以表示为
X(k)=[x(k),x(k-1),…,x(k-M+1)]T (5)
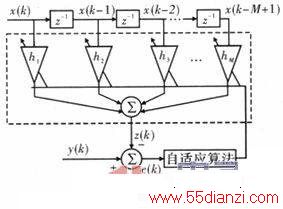
各抽头信号乘以各自的权重系数再相加就得到滤波器的输出信号z(k),这些权重系数分别为h1(k),h2(k),…,hM(k),用向量可以表示为
h(k)=[h1(k),h2(k),…,hM(k)]T (6)
滤波过程就是上述两个向量相乘的过程,即

3.2 最小均方误差(MSE)准则
各种不同的自适应算法取决于不同的准则函数&epSILon;(k),自适应滤波所采用的最优准则有最小均方误差(MSE)准则、最小二乘(LS)准则、最大信噪比准则、统计检测准则以及其他一些最优准则。其中应用最广泛的准则为最小均方误差准则,通常把根据最小均方误差准则建立的最优滤波器称为维纳滤波器。最小MSE准则是使抵消器的输出e(k)的均方值达到最小,即
s(k)=E[ e2(k)]=min (8)
ε(k)称为MSE准则函数。抵消器的输出为
e(k)=y(k)-z(k)=s(k)+n(k)-z(k) (9)


本文关键字:滤波器 传感-检测-采集技术,电子知识资料 - 传感-检测-采集技术






