5 测试 本次测试姿态解算更新周期T ≈ 4 mS,PID控制更新周期T ≈ 10 ms,期望值为水平0度。将四轴飞行器控制仰俯角的一对电机固定住,另一对边能自由旋转,即能改变横滚角度,如图6所示。将横滚角倾斜到 - 70°,遥控器油门迅速推到1400,平衡后如图6所示。

将四轴飞行器采集的欧拉角值通过无线模块NRF24L01发送到PC机上,接收的数据显示到上位机进行分析。上位机显示横滚角波形如图7所示,波形图横坐标单位为10 ms,纵坐标单位为度。
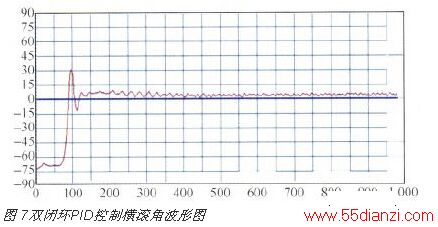
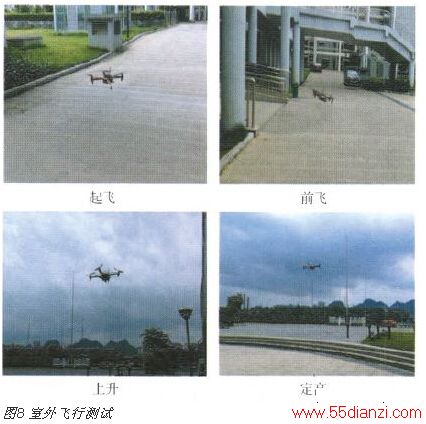
由图7可知,横滚角波形经过一大波一小波震荡后近似归为期望值零点,且超调量较小,系统很快进入稳定状态。 其他欧拉角测试结果类似。 在加入双闭环高度PID控制,四轴飞行器在室外飞行效果如图8所示,可以看出飞行器飞行稳定,达到设计要求。
6 结论 主要研究了基于四轴飞行器的双闭环PID控制算法。在姿态PID控制和高度PID控制中分别增加了内环角速度环和加速度环,不仅抗干扰能力强,并且回复迅速,增强了系统的鲁棒性。
本文关键字:飞行器 其它-综合,电器控制 - 其它-综合
上一篇:揭开断路器频繁误跳闸的原因






