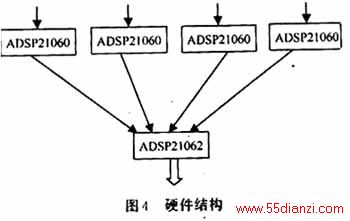
由于雷达信号处理流水进行的特点,可以按处理流程将整个系统划分成若干功能块,所以拟采用分布式并行处理系统。分布式并行处理系统由标准的并行子模块构成,恒虚警检测子模块由4个单元构成,M/N检测汇总子模块为1个单元,并行子模块之间由高速通信口相连,每对通信口间数据传输速率可达40 Mb/s。所有DSP都有通信口通过电路板插座连接到外部,利用数据流格式和相应的软件配置在邻近电路板间建立数据通路,这样减少了电路板间信号耦合。
4.2软件处理及实现分析
程序部分完成:CFAR、幅相计算、M/N检测等功能,需要5片DSP。
整个距离分4段,分别在4片DSP中进行CFAR、幅相计算等处理。段间有重叠,以保证每一段CFAR的左右单元平均可以独立进行。最后将4段的结果在下一片DSP进行合并、M/N检测,把目标信息后送。
(1)CFAR,幅相计算
杂波图恒虚警检测的主要功能是利用相应方位的杂波图输出作为门限,对零号滤波器各距离单元进行检测。其他滤波器输出采用单元平均CFAR处理方法对每个距离单元进行检测,同一个距离门的N-1个多卜勒通道检测结果选大作为CFAR检测结果,并与杂波图检测输出经或门后作为最终检测结果。检测结果有目标输出时,保留其幅值、相位信息。
程序流程分别从LINKX接收各自段的数据,先对数据作CFAR处理,检测到目标后,保存对应距离/多普勒单元信息,等到所有数据都处理完后,把结果通过LINKX送往下一级,主程序流程如图5所示。
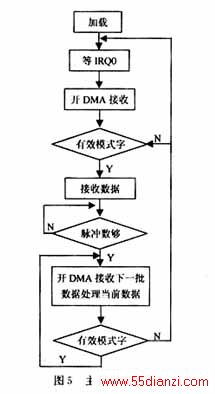
其中IRQ0是相干处理周期的起始信号,模式字的有效性通过校验码实现,高速通信口LINKX工作在DMA方式。
输入与输出的数据格式输入数据先是4个字的模式,接着是实、虚部交替的复数,个数同模式有关,每个复数对应一个距离/多普勒单元。CFAR检测结果格式,先是以4个字的模式,逐个字地检测到目标的个数,接着是各目标单元信息。
由于这一级在最不利的32点FFT情况下存储量大约为90 k个复数,所以DSP芯片选取了内存较大的ADSP21060。
(2)汇总与M/N检测
这一级的汇总任务是把4段的CFAR检测结果合并到一起,只要把各段中各个目标单元依据距离门的位置加以修整,然后搬到另一处缓冲区即可。这时目标信息排列的顺序是按距离门号依次递增的,先搬整个距离段上距离门号最小的第1段,再搬第2,3,4段。
M/N检测在相干处理周期间进行,其准则是相邻3个相干处理周期内至少有2次在同一个距离门上检测到目标,确认为相对应距离单元上有目标输出,这时保留相应单元上最新的幅值作为检测结果。
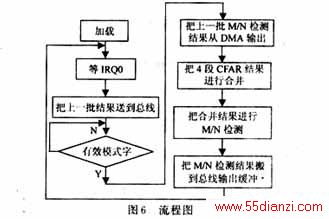
程序流程如图6所示。分别从LINK2,LINK3,LINK1,LINK5接收4个距离段上的检测结果,把4段的结果合并在一起,形成整个距离段完整的结果。然后和以前2次检测的结果进行M/N检测,最后把M/N检测的结果通过LINK0发往接口板。
四段的输入数据格式相同先是4个字的模式,逐个字地检测到目标的个数,接着是各目标单元信息。存储量不大,选取了内存较小的ADSP21062。
4.3运算量、内存、通讯资源占用情况
在CFAR检测中,包括零多卜勒通道各距离门利用相应波位的杂波图作为门限进行检
本文关键字:暂无联系方式综合-其它,单片机-工控设备 - 综合-其它






