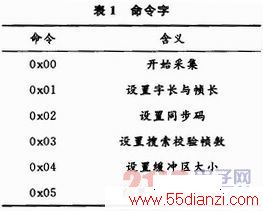
在此,采用统一的命令码方式,包含幻数、序数、传输方向、数据长度,使用宏_IO(),_IOR(),_IOW()和IOWR()辅助生成,如命令0设置如下:

在Ioctl中,采用switeh(cmd)来实现对FPGA参数的设置及FPGA状态的读取。
3.2.3 中断函数及读函数
当FPGA产生中断时,根据缓冲区的大小,中断函数循环对FPGA映射后的地址读取数据。ARM与FPGA接口为16位,使用inw读取,数据存放在驱动程序的缓冲区中:
应用程序读取数据时,调用read函数,参数buffer为用户空间缓冲区的指针,利用copy_to_user函数将数据从内核空间拷贝到用户空间,当设备中暂时没有数据时,读进程应当被休眠:
![]()
flag为一个标志位,当flag被中断函数设置为1时表示设备中有数据,此时读进程可被换醒。
3.2.4 用户程序及测试
设备驱动实现后,需编写相应的用户程序来进行测试驱动程序和实现数据的网络转发。在用户程序中,读/写FPGA设备使用与普通文件一样的操作函数。移植Linux时配置好网卡的地址,然后使用Socket编程实现数据的TCP/IP转发,用遥测软件接收到的数据测试如图7所示。

通过测试可以看到,同步码FDB18450被正确识别,IRIG-B解码为当前时间。
4 结语
在此,基于FPGA与ARM进行遥测数据的帧同步遥测数据的网络转发,充分地利用了FPGA与ARM各自的特点,它可使FPGA+ARM在数据接收处理中得到广泛应用。
本文关键字:接收机 DSP/FPGA技术,单片机-工控设备 - DSP/FPGA技术
上一篇:新型数据格式转换的FPGA实现






