需要注意的是,如果对已经寻址的从机再发送地址帧,则该从机SM2=1,恢复初始状态,和其他从机竞争。
(3)舵控信号 PWM 波的产生
对飞艇舵机的控制最终是通过舵控单片机产生PWM波来实现的。通常,产生PWM波不外乎硬件和软件两种方法。考虑到舵控单片机计算任务不大,本系统中采用软件产生PWM波的方法。下面以定时器0产生PWM波为例,说明通过软件产生PWM波舵控信号的实现方法。
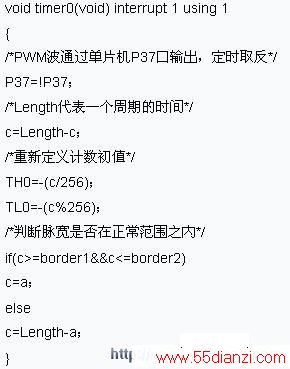
在程序中,由串口中断接收上位机发送的脉宽指令,继而通过改变入口参数a来调整PWM波的脉宽,并确保脉宽输出在正常范围之内。通过该方法产生PWM波切实可行,简单有效,可以广泛应用于 舵机控制 信号的产生中。
www.55dianzi.com
4 实验结果
实验中以FUTABA 3003舵机作为被控对象,由计算机模拟向舵控系统发送数据帧,通过示波器观察舵控信号的变化。实验结果表明,该舵控系统工作稳定,输出 PWM 波脉宽准确可靠,被控舵机转角线性度良好。
本文给出了小型自控飞艇舵控系统的主要设计方法,并详细阐述了在软件设计中几个关键问题的具体解决方案。实验结果证明,该系统能够很好地完成预定功能,根据上位机发送的指令准确地对艇上舵机进行控制。
参考文献
[1] 甘晓华,郭 颍.飞艇技术概论[M].北京:国防工业出版社,2005.
[2] P89C51RA2/RB2/RC2/RD2xx中文器件手册.
[3] 王明顺.基于LM2576的高可靠MCU电源设计[J].国外电子元器件,2004,11:12-14.
[4] 刘歌群,刘卫国,卢京潮.无人机强实时性串行通讯程序设计[J].计算机应用,2005,25(1):210-212.
[5] 张培仁.基于C语言编程MCS-51 单片机 原理与应用[M].北京:电子工业出版社,2003.
本文关键字:单片机 DSP/FPGA技术,单片机-工控设备 - DSP/FPGA技术






