������PID����Ӧ�ü�����̽�� .
������PID����Ӧ�ü�����̽�� .
�������7216 �� ¼��ʱ�䣺03-04 11:41:52 ������http://www.55dianzi.com ������plcӦ��
 �����������õ��IJ��������ߣ�
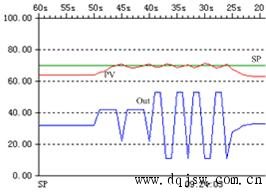
�����������õ��IJ��������ߣ�  ��������һ������ǰ�IJ��������ߣ����̱���PV��������̫����
��������һ������ǰ�IJ��������ߣ����̱���PV��������̫����  ��Ȼ����ǰ����PID��������Զ������������õ�PID������࣬ʹ�������õ���PID������������״Ҳ��ࡣ �Ҿ��������ӵ�PID�����������Ǻܺ��õġ�Ҫ�ú�PID���ڣ������PID�ļ��㹫ʽ��PID�����������Ǻ��б�Ҫ�ġ�������PID�Ĺ�ʽ��
��Ȼ����ǰ����PID��������Զ������������õ�PID������࣬ʹ�������õ���PID������������״Ҳ��ࡣ �Ҿ��������ӵ�PID�����������Ǻܺ��õġ�Ҫ�ú�PID���ڣ������PID�ļ��㹫ʽ��PID�����������Ǻ��б�Ҫ�ġ�������PID�Ĺ�ʽ��  ʽ������ź�e(t) = SP(t) �C PV(t)��M(t)��PID�����������ֵ��Kc�ǿ����������棨����ϵ������Ti��Td�ֱ��ǻ���ʱ�����ʱ�䣬Minitial��M(t)�ij�ʼֵ��ʵ�����ǻ��ֵij�ʼֵ�� PID��ʽ��ǰ3��ֱ��������Ļ��ֺ����ĵ��������ȡ� �֡������Ǹߵ���ѧ�ĸ������û��ѧ���ߵ���ѧ����������Ҫ������ֺͻ��ֵļ������壬�����������PID�����������кܴ�İ����� ���ֶ�Ӧ����ͼ���������e(t) ���������Χ�������ͼ�еĻ�ɫ���֣���PID������������ִ�еģ�ִ��PID�����ʱ����ΪTs����PID���ƵIJ������ڣ�������ֻ��ʹ����������������ϼ��ʱ��ΪTs��һЩ��ɢ�ĵ��ֵ��������֣���˲����ܼ����ȷ�Ļ���ֵ��ֻ�ܶԻ��������Ƽ��㡣 һ������ͼ�еľ������֮�������ƾ�ȷ���֡���Ts��Сʱ�����ֵ�����
ʽ������ź�e(t) = SP(t) �C PV(t)��M(t)��PID�����������ֵ��Kc�ǿ����������棨����ϵ������Ti��Td�ֱ��ǻ���ʱ�����ʱ�䣬Minitial��M(t)�ij�ʼֵ��ʵ�����ǻ��ֵij�ʼֵ�� PID��ʽ��ǰ3��ֱ��������Ļ��ֺ����ĵ��������ȡ� �֡������Ǹߵ���ѧ�ĸ������û��ѧ���ߵ���ѧ����������Ҫ������ֺͻ��ֵļ������壬�����������PID�����������кܴ�İ����� ���ֶ�Ӧ����ͼ���������e(t) ���������Χ�������ͼ�еĻ�ɫ���֣���PID������������ִ�еģ�ִ��PID�����ʱ����ΪTs����PID���ƵIJ������ڣ�������ֻ��ʹ����������������ϼ��ʱ��ΪTs��һЩ��ɢ�ĵ��ֵ��������֣���˲����ܼ����ȷ�Ļ���ֵ��ֻ�ܶԻ��������Ƽ��㡣 һ������ͼ�еľ������֮�������ƾ�ȷ���֡���Ts��Сʱ�����ֵ����� 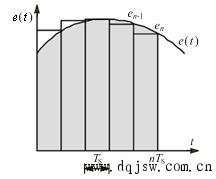 ���������e(t)����һ�����ߣ�����ͼ������������x��������ļнǦ�������ֵtg����Ϊ�õ㴦����һ����de(t)/dt��PID�������������ʽ�еĵ�������ʽ�����ƣ� de(t)/ dt �� ��e(t)/��t = [e(n) - e(n-1)]/Ts��ʽ��e(n)�ǵ�n�β���ʱ�����ֵ��e(n-1)�ǵ�n-1�β���ʱ�����ֵ��
���������e(t)����һ�����ߣ�����ͼ������������x��������ļнǦ�������ֵtg����Ϊ�õ㴦����һ����de(t)/dt��PID�������������ʽ�еĵ�������ʽ�����ƣ� de(t)/ dt �� ��e(t)/��t = [e(n) - e(n-1)]/Ts��ʽ��e(n)�ǵ�n�β���ʱ�����ֵ��e(n-1)�ǵ�n-1�β���ʱ�����ֵ�� 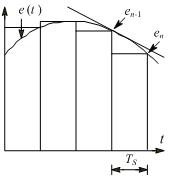 1.ģ�����ƵĹؼ��������ܽ������ʵ�����ݣ�Ȼ�����ɺ�ϻ�ӣ��������أ�ʵ�ʶ��Ǿ��������
1.ģ�����ƵĹؼ��������ܽ������ʵ�����ݣ�Ȼ�����ɺ�ϻ�ӣ��������أ�ʵ�ʶ��Ǿ����������һҳ [1] [2] [3] [4] ��һҳ
���Ĺؼ��֣����� ������ ������plcӦ����plc���� - plcӦ�� - ������plcӦ��






