在液压系统中,经常要求系统能控制处理多个执行机构同步运行的问题。下面以笔者为国内某热电厂所设计的由一台PLC和四个电液比例阀组成的系统为例,说明同步系统的组成及程序设计方法。
一、系统组成
系统由PLC、电流比例阀、齿轮双齿条油缸及转动执行机构等部分组成。由PLC控制四个电液比例阀分别驱动四个齿轮双齿条油缸,带动四个执行机构转动。控制要求规定:四个执行机构转动时,其转动速度应同步,最终的转动位置角度应相同。
系统的PLC选用Koyo SZ-4型产品,其各种模块安装在机架内的不同槽位上,I/O点的地址定义号由该模块所在的槽位决定,八槽机架所安装的模块类型及其地址定义号如图1所示。

图1
系统的开关量输入模块选用8ND1型和16ND1型24VDC模块,它们的地址号为1010~1077,共56点。主要用来连接按钮输入信号和接收绝对式旋转编码器发生的编码信号。开关量输出模块选用8TR1型24VDC模块,它的地址号为~010~Q017,主要用来连接各种指示灯。模拟量输出模块的型号为2DA2,该D/A模块提供2路-10V~―+10V的输出电压。Z-CTIF为高速计数模块,该模块用于接收增量式旋转编码器发来的高速脉冲。
比例阀选用的是4WRZ16型先导式电液比例换向阀,其电源形式为直流24V,电磁铁名义电流为800mA。由PLC输出的-10V~+10V电压控制功率放大器输出-800mA~+800mA电流,输出电流的大小决定了电液比例阀阀口的开度。
系统选用Koyo TRD-NA360PW绝对式旋转编码器作为执行机构转动角度检测反馈元件。当电液比例阀驱动齿轮双齿条油缸带动执行机构低速转动时,绝对式旋转编码器可将执行机构的转动位置角度实时反馈给PLC。系统选用的增量式旋转编码器用于发出执行机构转动方向和转动角度大小的指令。
二、程序设计方法
1、旋转编码器数据采集的编程方法

图2为绝对式旋转编码器和增量式旋转编码器数据采集的部分程序。通过绝对式旋转编码器检测出的执行机构转动角度值分别存放在数据寄存器R2000~R3000中,程序中使用的GRAY指令可以将格雷码转换为十进制角度值。由于采用了9位绝对式旋转编码器,因此在进行十进制角度换算时需减去一个常数(K76)。SP1指令的作用是使PLC能实时检测执行机构的转动角度值。
使用Z-CTIF高速计数模块采集增量式旋转编码器发出的脉冲信号时,其脉冲数及正负标志分别存放在数据寄存器R1174、R1175中。SZ-4PLC提供一个高速加减计数器(编号为CAT174,其数据寄存器地址号为R1174),可接收5kcps的高速脉冲信号。利用PLC的扫描工作原理,程序可自动判断前后二个扫描周期中R1174内的脉冲数值是否相等。当前后二个扫描周期中R1174内的脉冲数值不相等时,表明增量式旋转编码器在转动。此时将高速计数器CAT174内的脉冲数值赋给数据寄存器R3062,利用此脉冲数值可对执行机构转动角度的大小进行控制。而将CTA175(数据寄存器地址号为R1175)内的数值赋给RMO(地址为MO~M17),通过对M17进行“0”、“1”的判断,可知旋转编码器的转动方向,据此确定执行机构的转动方向。程序中脉冲指令PD M112的作用是在旋转编码器停止转动时,使高速计数器复位;脉冲指令PD M113的作用是对高速计数器进行初始复位。
2、系统同步的编程方法
针对四个执行机构的转动速度和最终转动位置角度同步的控制要求,本系统程序设计的基本思路是:
(1)通过输出正负电压,控制电流比例阀A、B电磁铁的通断,实现控制执行机构的转动方向同步;而通过输出不同电压值,调节电液比例阀阀口的开度,实现对执行机构转动速度快慢的控制。
(2)将由增量式旋转编码器发出的执行机构需转过的角度α,平均地划分成n个相等的目标角度β,β=α/n。通过在每一个目标角度β内,控制四个执行机构转动位置角度同步的方法,实现其转动速度和最终转动角度的同步控制要求。
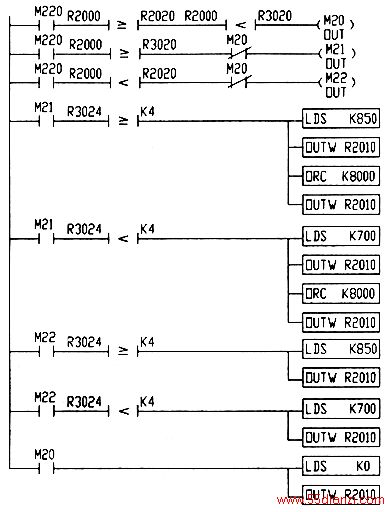
图3为控制一个执行机构转动的程序,其余三个执行机构的转动程序与此类似。程序执行时,PLC首先对执行机构当前的位置角度进行判断,如果执行机构当前的位置角度不等于目标角度,向其电液比例阀的控制量赋一个数值,控制执行机构各目标角度β转动。当执行机构转动到目标角度β的范围内(β±1)时,将其电液比例阀的控制量赋零,关闭阀口,使执行机构停止转动。当四个执行机构转动到同一个目标角度β的范围内时,再控制执行机构进行向下一个目标角度β转动。PLC重复上述的控制过程,直至四个执行度β转动。PLC重复上述的控制过程,直至四个执行机构都转动到最终的转动位置角度α。系统实际运行结果表明,如果数值n和β的误差大小确定的合理,则先转动到β角度位置的执行机构不会出现有明显停顿的现象。
3、应注意的几个问题
(1)系统上电时,先由PLC控制四个齿轮双齿条油缸带动执行机构转动到初始位置,使其初始的转动角度相同。这样在系统启动后,执行机构可能从同一个转动角度位置出发,有利于系统较快地达到同步的效果,否则要经过一个过程后系统才能达到同步。
(2)使用PI进行调节,液压系统稳定性较好,但当执行机构接近转动的目标角度时,出现执行机构转动速度明显下降的现象。为解决PI调节执行机构转动时间过长的问题,程序中采用了分段输出不同常数电压值的方法,即向电液比例阀输出一个较高的电压值,使执行机构开始转动;当执行机构接近转动的目标角度时,向电流比例阀输出一个较小的电压值。这样可以使系统具有较快的启动响应速度,且能够平稳地停止。
三、结束语
本系统经调度成功后,已应用在国内某热电厂风扇磨打击轮拆装车四轮转向液压控制系统中,一年多来运行一直稳定可靠,证明其对于液压同步性能要求不是很高的系统不失为一种较好的解决方法,同时该设计方法也可应用到其他PLC同步系统中,工作原理基本相同。
本文关键字:程序设计 电工文摘,电工技术 - 电工文摘






