一、引言
随着现代住宅小区物业管理的不断完善,需要将小区内多部电梯进行集中监控,以便实时监视电梯的运行状态及故障,及时采取对策,减少或避免事故的发生。电梯远程监控系统能够实现对多部电梯运行状态及故障状态的远程实时监控,降低服务成本,节省大量的人力,是现代化物业管理的必要手段。
电梯远程监控系统对电梯信息进行采集与处理,并将处理后的信息显示出来,所以远程监控系统的监控质量在很大程度上决定于信息的采集与处理环节。电梯远程监控系统采集卡完成对多部电梯信息的采集与处理,其核心是一片89C51单片机,它负责对一部电梯各种状态信息的采集、处理及故障诊断,并在上电初始时刻执行硬件自检工作。在远程监控系统中,每块采集卡负责采集、处理一部电梯的信息,各采集卡上的单片机作为下位机,与作为上位机的远程PC机进行通讯,PC机将电梯的状态、楼层及运行故障实时地显示出来。针对电梯机房的实际特点,采集卡的硬件中设计了Watchdog电路,软件中采用数字滤波与防“串扰”等技术。保障了系统的正常工作。本系统实现了用一台PC机对26部电梯的远程集中监控。
二、远程监控系统构成及通讯协议
实现电梯远程监控系统的关键是解决一台PC机与多台单片机的远程通讯问题。系统中PC机作为上位机,单片机作为下位机,构成主从关系。由于距离较远,因此考虑采用RS-485通讯方式。PCL746+4端口接口卡的4个端口都可以独立地设置为RS-232、RS-422或RS-485通讯方式,将接口卡设置为RS-485方式后插入PC机的ISA槽中,在WINOOWs98操作系统中添加串口后,每个新添加的串口都拥有一个独立的地址和中断号,因此新添加的串口与PC机的原有串口COM1,COM2使用方法相同,在上位机软件中仍然可以对新添加的端口使用串行通讯MSCOMM控件,从而实现了RS-485通讯。图1为监控系统的构成图。

图1 系统的构成图
监控过程中,下位机不断循环采集电梯的各状态信息,并根据采集来的信息计算电梯当前所处的楼层,判断电梯的状态与故障,并将其按照一定的格式放在一组字节当中,上位机依次向下位机群发送一地址字节,当下位机接收到上位机发来的地址字节后,产生中断并判断此地址是否与本机地址相同,若相同,下位机向上位机依次发送一组字节,包括起始字节、电梯的各运行状态、楼层与故障信息、校验字节和结束字节;若不同,退出中断,继续采集处理数据。上位机接收到下位机发送来的信息后,将其显示出来从而达到集中监测的目的。
为了保证通讯过程的正确,对下位机向上位机传输的一组字节采用两种校验手段:地址校验与累加和校验。上位机向下位机发送地址字节后,下位机向上位机回送本机地址,判断两者是否一致;对于下位机向上位机发送的一组字节,上位机与下位机分别进行累加,判断两累加和是否相同。任意一种校验发生错误,该组字节无效。
三、电梯远程监控系统采集卡
1、采集卡硬件的设计与实现
采集卡完成对电梯各状态信息的采集与处理,并实现上位机与下位机之间的通讯。它由电源、数据采集模块、显示模块、RS-485通讯模块及Watchdog电路等组成,其硬件原理图如图2所示。
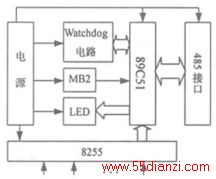
图2 采集卡硬件原理图
数据的采集是通过一片并行接口芯片8255实现的,需采集的电梯信息包括急停开关(ES)、检修开关(INS)、抱闸节点(BY)、门锁节点(DFC)、超载开关(LWO)、锁梯开关(PKS)、换速开关(IPU、IPD)、方向信号(CUDL、CDDL)、限位开关(1LS、2LS)与楼层等。通讯模块75176连接上位机与下位机,实现两者之间的RS-485通讯。MB2键用来完成手动硬件图3―1采集卡硬件原理图自检过程,当上电初始时刻,CPU自动对4部分硬件(ROM、RAM、I/O口、CPU)进行检测,当检测到某部分有故障时,需要手动按MB2键依次检测4部分硬件。数码管用来显示采集卡所处的各个状态,当采集卡处于硬件检测、采集并处理数据、向上位机发送数据等各状态时,数码管分别显示不同的标志进行标识。
由于电梯机房内安装有大功率变频器等设备,会对采集卡造成较大的干扰,因此在采集卡中设计了Watchdog电路,用来检测单片机程序是否正常运行。单片机程序正常运行时,单片机每隔一段时间向Watchdog电路发送一脉冲;当干扰过大造成程序执行异常时,若Watchdog电路在超过2秒的时间内未接收到单片机发来的脉冲时,对单片机进行硬件复位。
2、采集卡软件的设计与实现
由于电梯监控系统是采用一台PC机对多部电梯的监控,为减轻上位机的工作量,下位机除负责采集数据外,还应承担计算楼层、判断故障等任务,将采集来的原始信息经处理后按照一定格式发送给上位机。采集卡软件包括初始化、硬件自检、数据采集、数据处理、数据发送等几部分组成,图3、图4分别为其主程序和中断处理子程序。在软件的设计过程中,数字滤波与防“串扰”是需要解决的两项关键技术。
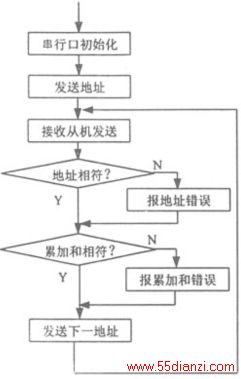
图3 采集卡主程序框图
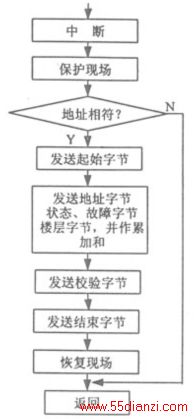
图4 采集卡中断程序框图
(1)数字滤波技术
由于电梯控制柜中有些信号采用继电器节点控制,在下位机的高速采集过程中,极有可能采集到继电器节点介于完全断开与完全闭合之间的过渡状态,造成错误,所以应当对采集的信息进行数字滤波,保证将继电器的过渡状态完全滤掉。
采用数字滤波方法,能够很有效地将继电器结点的过渡状态滤掉,但同时产生了两个负面影响:
①丢号现象:存在时间很短的信号(如换速信号IPU,IPD)被认作是错误信号而被滤掉。
③滞后现象:滤波的时间太长(约1s),难以实现多机通信。
丢号现象的解决可以采用在中断子程序中对IPU、IPD进行特殊处理的方法。对于这两个信号,不采用连续多次的滤波结果,而是由滤波过程中最新采集的数据确定。滤波的滞后问题是不可避免的,只能将其加以改进。一种可取的方案是适当的打开、关闭中断,将上位机向下位机发送地址所引起的下位机中断按照发生时刻分为两种情况:第一种情况发生在下位机采集与滤波阶段,下位机向上位机发送前一次滤波过程得到的数据;第二种情况发生在下位机处理数据阶段,此时下位机向上位机发送本次滤波过程得到的数据。保证上位机发送来的中断请求能在短时间内响应,从而实现多机通讯。
(2)防“串扰”技术
采集卡的RS-485通讯为半双工工作方式,因此在上位机与下位机群通讯时会发生所谓“串扰”现象。例如上位机向下位机发送02地址字节,02号下位机产生中断并向上位机发送一组字节,若其中有一个字节为03,则03号下位机误认为是上位机发送的地址字节,也向上位机发送字节,遂引起下位机02与03之间的串扰,在多机通讯中,此现象应当避免。
为避免“串扰”现象,在上位机与下位机程序中分别进行处理。下位机的串行口采用方式3,将8位数据的最高位作“人为配偶位”,对该位的设置原则是确保RB8始终为1。上位机采用串行通讯MSCOMM控件,将控件设置为Settings=“9600,8,E,1”,上位机向下位机发送地址字节时,将8位数据的最高位也作为“人为配偶位”,不过该位的取值与下位机地址字节的“人为配偶位”正好相反,这样保证奇偶校验位始终为0。而MSCOMM控件的奇偶校验位与下位机的RB8对应,所以当设置下位机SM2=1时,只有上位机发送的地址字节才能引起下位机中断,下位机向上位机发送的任何字节都不会引起其它下位机中断,从而避免了“串扰”现象。
(3)故障诊断与楼层计算
上一篇:电气设备外部噪声的抗干扰技术分析






