1 前言
随着电子、计算机、信息处理技术的应用与发展,传统低压电器在品种、功能、性能等方面都得到了迅速提高,发展趋势是集成化、网络化、小型化和节能环保。
20世纪80年代末,法国施耐德公司在国际上首次推出了一种新型的模块化低压电器――控制与保护开关电器。CPS将断路器、接触器、热继电器等电器的功能融为一体,用户选用CPS时无需考虑控制和保护电器元件间的特性配合,这种模块化单一结构型式的多功能集成化电器为低压配电与控制系统提供了一种新型理想的基础元件1。经过20余年的发展,CPS产品在国内外得到了迅速发展,第二代CPS已经面世,但仍采用模块化组合结构。为简化CPS的内部结构,我们研制开发了一种全新结构的CPS,采用一体化集成技术路线,在单一结构的电器上,用一套触头及灭弧系统、一套电磁操动系统和一套数字化测量与控制单元实现了CPS的全部功能。该产品已通过型式试验并进入批量生产,在集成化、小型化和节能环保等方面居于国际领先水平。
当今,网络化日趋成为低压电器功能完善与否的一个重要标志。CAN总线的数据通信具有突出的可靠性、实时性和灵活性。为此,本文应用CAN总线技术实现CPS的网络通讯功能。
2 系统硬件设计
图1所示为带有CAN总线的CPS网络系统拓扑结构图。它由三部分组成:工控机(上位机)、CPS(下位机)和CAN总线网络。其中CPS位于生产现场,完成对线路和用电设备的控制和故障保护。工控机位于控制室,用来监测和收集网络上各个CPS的工作状态和设定其工作参数。CAN总线实现各个CPS之间以及和工控机间的互连。
 screen.width*0.7) {this.resized=true; this.width=screen.width*0.7; this.alt='点击在新窗口浏览图片\nCTRL+Mouse 滚轮可放大/缩小';}" border=0>
screen.width*0.7) {this.resized=true; this.width=screen.width*0.7; this.alt='点击在新窗口浏览图片\nCTRL+Mouse 滚轮可放大/缩小';}" border=0>
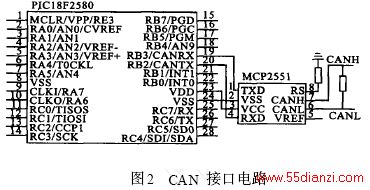
位于生产现场的CPS是CAN总线上的一个节点,采用Microchip公司生产的PIC18F2580单片机作为微控制器。PIC18F系列单片机片内集成了CAN控制器,支持CAN2.0A协议及最新的CAN2.0B协议,可以和任何遵循CAN通讯标准的器件互连。同时,CAN控制器集成了CAN协议的物理层和数据链路层功能,可完成对通信数据的组帧处理,具有多主结构、总线访问优先权、硬件滤波等特点。为避免网络中有节点未加电而影响整个网络的工作以及防止当总线出现短路故障时而损坏CAN控制器的输出驱动器,在实际应用中,必须在CAN控制器与总线之间设置一个接口电路。该接口电路已经被很多厂家集成为接口芯片。本设计采用Microchip公司生产的MCP2551作为驱动电路。
MCP2551是CAN协议控制器和物理总线的接口,它可以提供总线差动的发送能力和接收能力,高速应用可达1Mbaud,最多可挂110个节点。图2所示为电路原理图。
 screen.width*0.7) {this.resized=true; this.width=screen.width*0.7; this.alt='点击在新窗口浏览图片\nCTRL+Mouse 滚轮可放大/缩小';}" border=0>
screen.width*0.7) {this.resized=true; this.width=screen.width*0.7; this.alt='点击在新窗口浏览图片\nCTRL+Mouse 滚轮可放大/缩小';}" border=0>
上位机亦可作为CAN总线上的一个节点,实现数据的收发功能。但上位机需要通过RS232串口和CAN总线进行交换。因此,需要使用转换电路。目前市场上有许多CAN总线转换器,本设计选用CAN232MB智能协议转换器。CAN232MB智能协议转换器集成有一个RS-232通道和一个CAN通道,可以很方便地嵌入到使用RS-232接口进行通讯的节点中。内部采用CAN控制器SJA1000和CAN收发器PCA82C251来实现CAN接通讯接口功能。
CAN232MB转换器以及MCP2551和CAN总线连接时应遵循CANL连接CANL,CANH连接CANH。按照ISO11898规范,为了增强CAN通讯的可靠性,CAN总线网络的两个端点通常需要加入终端匹配电阻(120)。终端匹配电阻的大小有传输电缆的特性阻抗所决定。例如双绞线的特性阻抗是120,则总线两个端点也应该集成阻值为120 的终端匹配电阻。接线方式如图3所示。
 screen.width*0.7) {this.resized=true; this.width=screen.width*0.7; this.alt='点击在新窗口浏览图片\nCTRL+Mouse 滚轮可放大/缩小';}" border=0>
screen.width*0.7) {this.resized=true; this.width=screen.width*0.7; this.alt='点击在新窗口浏览图片\nCTRL+Mouse 滚轮可放大/缩小';}" border=0>
3 系统软件设计
本系统的软件设计包括两部分:下位机通讯软件的设计和上位机远程操作与管理的设计。下位机程序采用汇编语言编写,速度快、实时性好。上位机程序采用Delphi语言编写,开发的程序符合WINOOWs操作系统应用程序的风格,界面友好,操作方便。
3.1 下位机通讯软件的设计
PIC18F2580中CAN模块一共有6种工作模式:初始化模式、禁止模式、正常工作模式、监听模式、环回测试模式、错误识别模式。其中在初始化模式下,模块将不发送也不接收,编程器有权访问配置寄存器,CAN模块的工作方式将在该阶段确定。CAN接收数据和CAN发送数据在正常工作模式下完成。
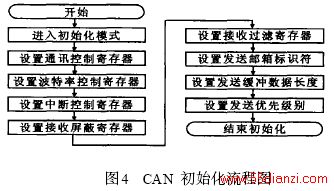
3.1.1 CAN模块初始化
CAN模块的初始化过程在整个CAN总线通讯过程中占有极其重要的地位,直接关系到之后的通讯质量,甚至影响到通讯能否成功进行。图4所示为CAN模块的初始化流程图。
 screen.width*0.7) {this.resized=true; this.width=screen.width*0.7; this.alt='点击在新窗口浏览图片\nCTRL+Mouse 滚轮可放大/缩小';}" border=0>
screen.width*0.7) {this.resized=true; this.width=screen.width*0.7; this.alt='点击在新窗口浏览图片\nCTRL+Mouse 滚轮可放大/缩小';}" border=0>
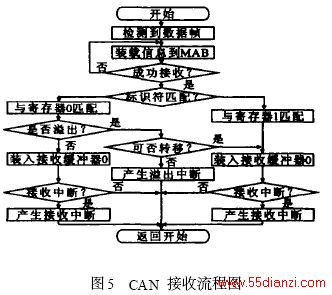
3.1.2 CAN模块的数据接收
CAN模块接收数据帧时采用中断机制,图5所示为流程图。在接收数据过程中需要使用信息接收过滤器与屏蔽器。通过将标识符中的相应位与屏蔽器和过滤器进行比较可以确定信息是否被装入接收寄存器。
 screen.width*0.7) {this.resized=true; this.width=screen.width*0.7; this.alt='点击在新窗口浏览图片\nCTRL+Mouse 滚轮可放大/缩小';}" border=0>
screen.width*0.7) {this.resized=true; this.width=screen.width*0.7; this.alt='点击在新窗口浏览图片\nCTRL+Mouse 滚轮可放大/缩小';}" border=0>
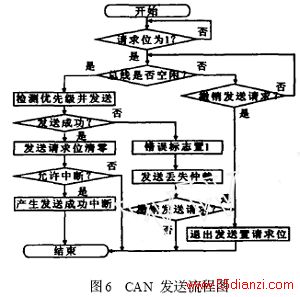
3.1.3 CAN模块的数据发送
PIC18F系列CAN模块有3个发送缓冲器。每个缓冲器有14个字节的SRAM,处于模块的存储地址中。在发送过程中,被发送信息的标识符可分为11位长的标准标识符和29位长的扩展标识符。类型的选择可以通过更改发送缓冲器标识符寄存器的EXIDE位值实现。如图6所示为发送流程。
 screen.width*0.7) {this.resized=true; this.width=screen.width*0.7; this.alt='点击在新窗口浏览图片\nCTRL+Mouse 滚轮可放大/缩小';}" border=0>
screen.width*0.7) {this.resized=true; this.width=screen.width*0.7; this.alt='点击在新窗口浏览图片\nCTRL+Mouse 滚轮可放大/缩小';}" border=0>
3.2 上位机操作界面的设计
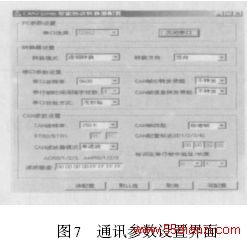
上位机软件的功能主要包括两部分:通讯参数设置和对下位机工作状态的监测和设置。本设计采用了Delphi软件提供的SPComm控件,利用计算机的COM串行通信口实现与集成低压电器的单片机进行通讯。
系统运行在WINOOWs平台上,有强大的数据显示、存储及查询功能。通讯参数的设置主要是对CAN232MB智能协议转换器和PC串口工作状态的设定,操作界面如图7所示。该界面由四部分组成:“PC参数设置”负责决定上位机进行通讯的串口;“转换器设置”负责设置CAN232MB智能协议转换器的工作方式;“串口参数设置”负责设置串口通讯的参数;“CAN参数设置”负责设置CAN总线通讯的参数。
 screen.width*0.7) {this.resized=true; this.width=screen.width*0.7; this.alt='点击在新窗口浏览图片\nCTRL+Mouse 滚轮可放大/缩小';}" border=0>
screen.width*0.7) {this.resized=true; this.width=screen.width*0.7; this.alt='点击在新窗口浏览图片\nCTRL+Mouse 滚轮可放大/缩小';}" border=0>
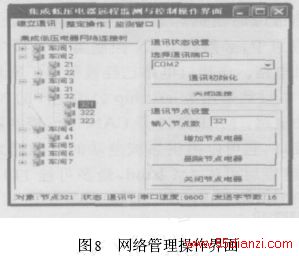
对下位机工作状态的监测和设置由上位机的远程操作系统来完成。系统主要包括三个模块,分别是网络管理模块、现场单元参数整定模块和监控模块。
图8所示为网络管路模块的操作界面。通过构建网络图,用户可以方便地掌握所操作的CPS是处于主线路、分支线路还是馈电线路。网络图中各CPS图标的代码就是其地址码,是与上位机的通讯桥梁。
 screen.width*0.7) {this.resized=true; this.width=screen.width*0.7; this.alt='点击在新窗口浏览图片\nCTRL+Mouse 滚轮可放大/缩小';}" border=0>
screen.width*0.7) {this.resized=true; this.width=screen.width*0.7; this.alt='点击在新窗口浏览图片\nCTRL+Mouse 滚轮可放大/缩小';}" border=0>
图9所示为现场单元参数整定模块的操作界面。其功能与现场单元的按键整定功能基本相同,但更便于集中操作和管理。
[1] [2] 下一页
本文关键字:技术 开关 电工文摘,电工技术 - 电工文摘






