关键词:虚拟仪器;测试系统;伺服单元;伺服电机
Abstract: A cell phone hinge test system is provided. This system is composed of NI PXI-8186 Controller, NI PXI-7344 Motion Controller, UMI-7764, YASKAWA SGDL-04AS Servo Pack,YASKAWA SGML-04AF12 Servo Motor and user interface based on virtual instrument technology (Labview). Virtual instrument technology minimizes the system and enhances stability.The system also has a friendly user interface and is easy to be upgraded.
Key words: Virtual Instrument; Measurement system; Servo Pack; Servo Motor
手机翻盖耐久性测试即将待测翻盖手机重复开合预设的次数,然后观察手机的各部分性能是否完好,这在翻盖手机的生产过程中是相当重要的一环。以往采用气动方式的系统运行速度较慢(约为每2 秒1 次)且操作界面不够友好。本文介绍的基于虚拟仪器技术的手机翻盖耐久性测试系统采用NI Motion 控制模块控制伺服电机进行驱动,运行速度可达到原来的4 倍多且同时可对4 部手机进行测试,而采用National Instruments公司的虚拟仪器(LabVIEW)进行开发,使操作界面非常友好。
在测试过程中操作人员针对每批不同型号的手机在初次测试时可使用微调功能将各个参数调整至理想值,并且可将这些参数存成相应的配置文件以备以后测试同样型号手机时使用,这样大大减少了每次测试时的重复操作,提高了系统的自动化程度。
1. 系统原理及概述
1.1 运动控制原理
运动控制的原理简单来说即由运动控制模块发出控制信号,如脉冲信号和模拟电压量等,这两种控制信号分别对应于位置控制模式和速度控制模式,伺服电机在相应的模式下接收到控制信号便能按照预定的方式运动。但是电机的运动存在误差,特别在模拟的速度控制模式下,因此需要电机发出编码信号反馈到运动控制模块,使运动控制模块能够根据实际的运动情况做出相应的补偿来消除累计误差,这一点对于本系统这样需要长时间连续运行的系
统来说尤为重要。下图为运动控制的简单原理示意图:
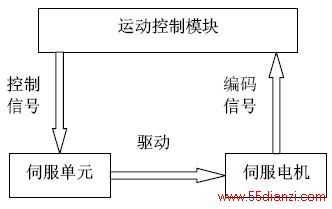
图1 运动控制原理示意图
1.2 系统概述
本系统利用NI Motion 控制模块对伺服电机运动进行速度控制,按照用户设置的参数驱动相应的拨片、拨杆控制手机翻盖的开合。整个系统框图如图2所示:

图2 手机翻盖耐久性测试系统框图
整个系统由两部分组成:运动控制部分和测试平台部分。运动控制部分由NI PXI控制器和运动控制模块NI PXI-7344 发出运动控制电压信号V-REF,通过NI UMI 7764 接至伺服电机驱动器。测试平台部分包括两套独立的平台,每套平台有一组电机控制4 台待测手机翻盖的开合(见图3)。全部4 台电机的控制信号分别由NI PXI-7344 的4 轴提供。每台电机上均有编码信号反馈至运动控制模块以形成闭环控制回路,另有Forward Limit和Reverse Limit信号反馈至运动控制模块用以确定系统的初始位置以及防止电机运动超出极限位置。
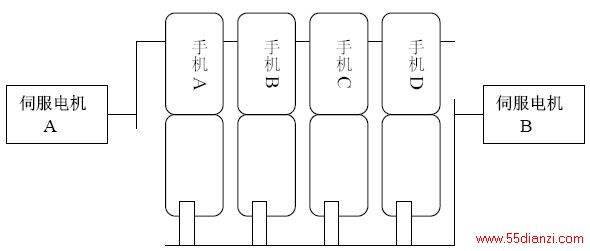
图3 测试平台示意图
2. 硬件连接
硬件配线包括伺服单元与伺服电机的连接、运动控制模块与伺服单元的连接。其中伺服单元与伺服电机的连接有专用的电缆和相应的端子定义,与伺服单元和伺服电机的的类型有关。下图是运动控制模块与伺服单元的连接以及限位信号的连接图:
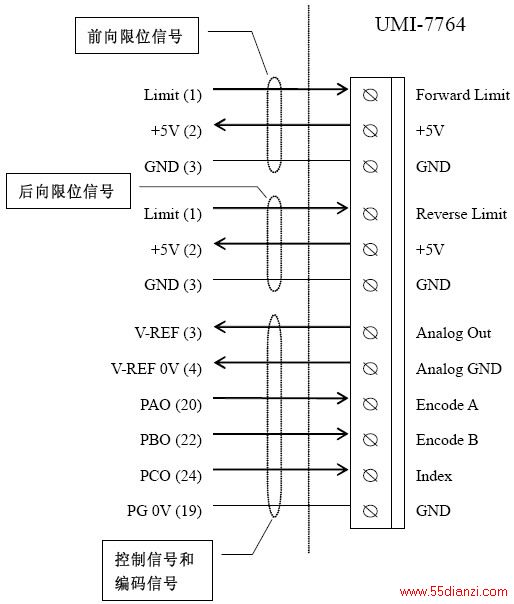
图4 运动控制模块与伺服单元及限位信号连接示意图
3. 软件结构和功能
整个软件是在National Instruments公司的面向对象的图形化编程语言LabVIEW 7.1下开发完成的,从上到下分为三层:高层通讯层,中层运动控制层,以及底层的驱动程序和开发环境支持。
底层开发环境和驱动程序接口是由软硬件厂商提供的,包括LabVIEW 7.1图形化编程环境和运动控制板卡的驱动程序。中层的运动控制层是在LabVIEW 环境下编程实现电机的运动控制,包括电机运动位置、速度以及对于本系统整体的运动流程。高层的通讯层是用于将用户设置的各项参数传递到运动控制层,同时将用户所需信息如当前运动速度、剩余时间等反馈到用户界面。
4. 基于虚拟仪器的操作界面
本系统使用Labview 7.1 设计了友好的操作界面,如图5 所示:
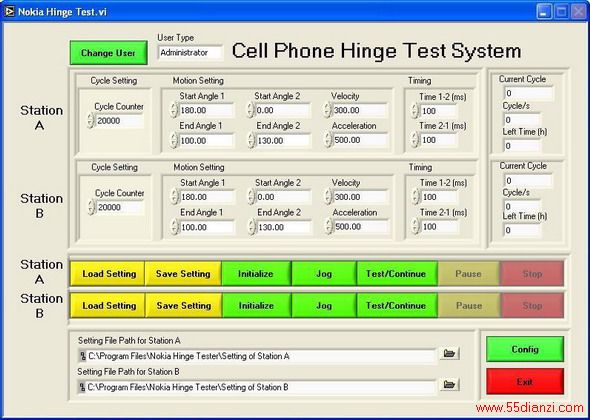
图5 手机翻盖耐久性测试系统操作界面
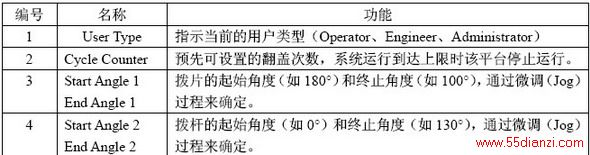
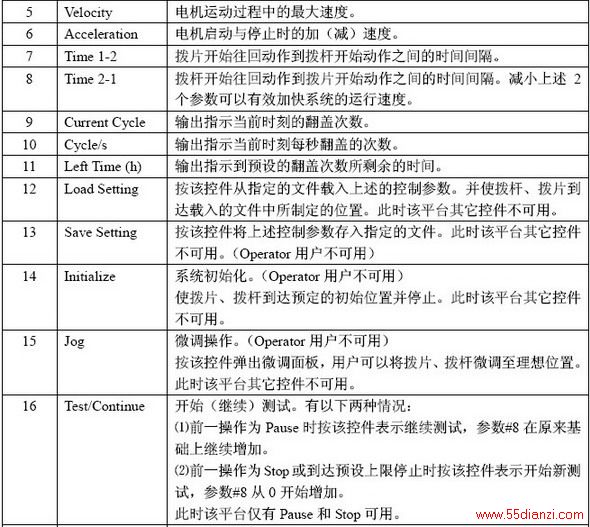
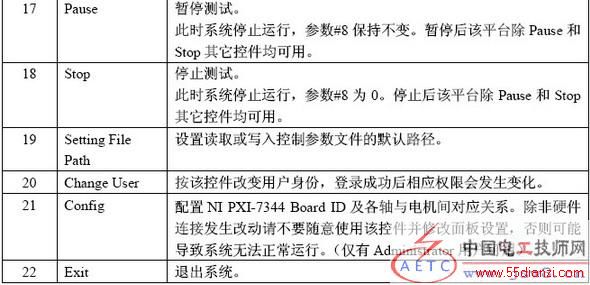
操作界面控件功能介绍如下(以Station A为例):
表1 操作界面控件功能
测试程序操作步骤:
1) 运行程序,系统自动以Operator 登录。
2) 系统开始对运动控制模块进行初始化,完成后弹出对话框询问是否需要载入控制参数,若选No则系统自动载入上次退出程序时的设置并使拨杆、拨片到达相应位置。若选Yes 系统继续弹出对话框询问需要载入哪套平台的控制参数。选定后系统载入相应配置文件并使拨杆、拨片到达相应位置。
3) 若所测手机型号已有相应配置文件存在,跳至5)步。若该型号为初次测试,则以Engineer登录。按Initialize控件使该平台初始化。
4) 按Jog 控件进入微调模式。将夹具微调至理想的起始位置和终止位置并记下对应角度值。按OK 控件回到主面板并将控制参数#2、#3 改为微调得到的结果。按Save Setting将当前设置存成新型号的配置文件。
5) 按Test/Continue控件开始测试。
6) 此时有3 种不同情况:
① 等待翻盖次数到达控制参数#1所设上限后该平台停止运行。
② 按Stop控件停止操作,控制参数#8 复0。
③ 按Pause控件暂停操作,控制参数#8 保持当前值,可以调整控制参数后继续测试。
7) 按Exit控件退出测试系统。
4. 结束语
本测试系统实现了对手机翻盖的耐久性测试,相对于传统的测试系统测试速度大大提高,并提供完善灵活的用户管理和系统设置功能。通过实际生产测试表明该测试系统工作状态稳定,提高了整个生产过程的效率。
参考文献
1. National Instruments Corporation. The Interactive Encyclopedia of Measurement and Automation, 2002
2. 吴麒. 自动控制原理. 清华大学出版社, 1990
3. 雷振山. LabVIEW 7 Express实用技术教程. 中国铁道出版社, 2004
上一篇:温度记录仪在冷链管理中的应用探讨






