这表明可以通过控制电机的输入电压 ![]() S来使得定子磁链
S来使得定子磁链 ![]() 按照一定的轨迹和速度来运动,从而达到控制磁链的目的。
按照一定的轨迹和速度来运动,从而达到控制磁链的目的。
忽略定子电阻后,定转子磁链夹角δ为负载角。暂态时,定转子磁链以不同速度旋转,δ发生变化;稳态时,定转子磁链均以同步转速旋转,δ为常值。由于电气时间常数远小于机械时间常数,所以可通过改变定子磁链的旋转速度和δ控制电磁转矩的变化。
通过控制定子磁链 ![]() 的幅值和旋转速度可以有效地控制电磁转矩。当定子磁链逆时针方向旋转时,如果反馈转矩小于给定转矩,那么就要选择保持定子磁链
的幅值和旋转速度可以有效地控制电磁转矩。当定子磁链逆时针方向旋转时,如果反馈转矩小于给定转矩,那么就要选择保持定子磁链 ![]() 同一方向旋转的电压矢量。负载角
同一方向旋转的电压矢量。负载角 ![]() 尽可能快地增大,反馈转矩也就增大。
尽可能快地增大,反馈转矩也就增大。
作为交流伺服系统的控制对象,许多场合要求永磁同步电机能够做恒功率运行。由于直接转矩控制系统本身即具有磁链闭环,因此弱磁运行时仅需给出速度―磁链函数关系,实现简单,响应迅速。
转矩的给定可由速度控制器给定,当永磁同步电机运行于恒转矩情况下,磁链给定可为额定值,恒定不变;但当运行于恒功率情况下时,需给出速度―磁链函数关系。
2.4 开关电压矢量表
考虑到不同的电压矢量对磁链和转矩的作用不同以及所处的不同区间,区间划分如图5所示,可得如表1所示的电压矢量开关选择表,其中φ=1,表示实际磁链小于参考磁链;τ=1,表示真实转矩小于参考转矩;当
φ=0或τ=0时反之。
 ?
? 表 1
φ
τ
θ
θ1
θ2
θ3
θ4
θ5
θ6
1
1
V2
V3
V4
V5
V6
V1
0
V6
V1
V2
V3
V4
V5
0
1
V3
V4
V5
V6
V1
V2
0
V5
V6
V1
V2
V3
V4
3 仿真结果
采用上述模型,利用MATLAB软件,我们对一台永磁同步电机进行了仿真研究。永磁同步电机参数如下:
R=0.75Ω, Ld=5.0mH, Lq=6.0mH, Ψf=0.3Wb, np=2
1. 电机空载,速度给定80rad/s起动;稳速后,0.03秒时突加6N・m的负载时的速度、定子磁链、电磁转矩如图6所示。
2. 电机空载,速度给定80rad/s起动;稳速后,0.04秒时速度给定为100rad/s。速度及定子磁链波形如图7所示。实际上,电机此时运行于弱磁情况下。
 ?
? 
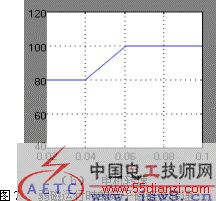 ?
? 由以上仿真结果可知,该系统转矩响应准确、迅速,在磁场已经建立的情况下,转矩响应几乎不需要时间,突加负载后,转矩也能较快地跟随负载转矩。磁链在起动时很快建立起来,达到额定磁链后可以在动、静态过程中近似保持恒定。而转速响应既保证了动态时快速性,又保证了静态时的稳定性,从图6(a)中可以看出动态过程中转速响应是一条直线,这说明电机是以最大转矩起动的,从0升速到80rad/s仅需13毫秒,当突加负载时,转速有轻微下降,但很快又跟随给定,表现出很大的抗扰性。弱磁运行时,转速上升时,磁链随之下降,如图7所示,但对永磁同步电机来说,需要注意的是过分弱磁可能会引起永久退磁,从而损坏电机。
4 结 论
本文分析了永磁同步电机的数学模型,
对永磁同步电机直接转矩控制的工作原理进行了介绍,并且利用仿真工具构造了仿真模型,对直接转矩控制系统进行了数字仿真,仿真结果表明该方法具有良好的动、静态性能。
参考文献:
[1] 许镇琳、窦汝振、翟轶强,永磁同步电动机直接转矩控制系统的研究,电气自动化,2000.4
[2] 李夙,异步电动机直接转矩控制,北京:机械工业出版社,1994.12
[3] L.Zhong、M.F.Rahman、W.Y.Hu、K.W.Lim , “Analysis of Direct Torque Control in Permanent Magnet Synchronous Motor Drives ”,IEEE TRANSACTIONS ON POWER ELECTRONICS ,VOL.12 ,NO.3 MAY 1997
本文关键字:同步电机 电工文摘,电工技术 - 电工文摘
上一篇:RFID系统频带选择性仿真分析






