
表1 部分样本数据
按照RBF神经网络训练步骤和算法,对本文的球磨机系统逆模型的RBF神经网络模型进行训练。神经网络的训练和仿真是在MATLAB7环境下,编制了相应的程序实现。训练后返回神经网络的权值、偏置值。网络训练过程的误差曲线如图3所示。
对实验样本数据进行仿真,得到预测误差曲线(神经网络输出值与样本目标值之差的曲线),如图4所示。
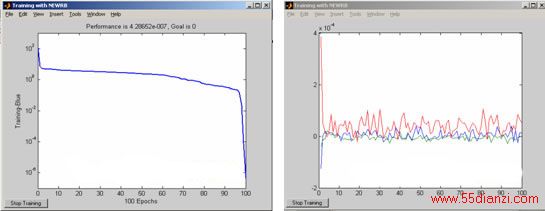
图3 神经网络训练误差曲线 图4 神经网络预测误差曲线
4 结束语
本文提出了一种基于多传感器信息融合的球磨机负荷检测方案,并详细地介绍了整个系统的各个环节。实验结果表明,该系统能够充分获取并融合球磨机工作环境所提供的外部响应信息,从而准确地检测出球磨机的负荷参数,为整个磨矿过程的自动控制提供了重要的技术支持。
参考文献
[1]王泽红,陈炳辰.球磨机负荷检测的现状与发展趋势[J].中国粉体技术,2001.7(1):19~23
[2]王泽红,陈炳辰. 球磨机内部参数的三因素检测.金属矿山[J],2002.1:32~34
[3]毛益平,高继森,陈炳辰.基于RBF网络球磨机双因素建模的研究[J].中国矿业,2000.9(5):75~78
[4]飞思科技产品研发中心.神经网络理论与MATLAB7实现[M].北京:电子工业出版社,2005.3
[5] 冯波. 多传感器信息融合技术的研究[D].中国优秀博硕论文全文数据库
附:
作者简介:周克良(1964――)男,江西赣州人,江西理工大学机电工程学院副教授,副院长,研究方向为工业过程控制。
联系方式:江西赣州江西理工大学机电04研戴建国 邮编:341000






