厨卫设备 应用领域 单片机 PLC例程 电子技术 毕业设计 使用手册 工具软件 电子书籍 电工技术 家电维修 机械制造
3 实验结果
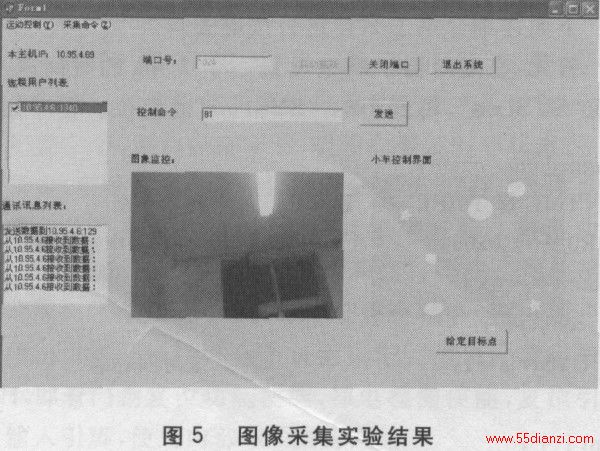
监控中心软件采用Delphi高级语言编制。在“控制指令”一栏中输入Ol(Ol代表采集图像指令),点击“发送”,随后监控界面的“图像监控”栏会显示摄像头采集到的远程环境信息。
实验时,攝像头的分辨率调整为320×240,两个GPRS收发器分别在相距4 m左右的房间两端,图5显示了实验结果。实验结果表明:基于GPRS移动通信网络和DSP技术的半自主移动机器人远程系统达到了预期的效果。同时在实验中也发现,GPRS传输数据的实时性是有限的,虽然理论上传输速率高达171 kb/s,但实际上受多种因素的影响,实际速率较低,传输一帧3K的JPEG格式图像大约需要3O~60s的时间。因此,如何进一步提高系统的实时性是本系统面临的最大挑战。
上一页 [1] [2]
本文关键字:机器人 远程控制 电工文摘,电工技术 - 电工文摘
上一篇:无线射频RFID导购机器人导航与控制系统的