系统在主电路中设置了过压、欠压、IGBT故障、电机过热、IPM过热、编码器故障检测等保护,故障信号经逻辑电路后可直接封锁开关脉冲,同时通过DSP的I/O口输入,通过软件检测来实现系统的保护。
3.2 软件设计
DSP伺服控制程序由3个部分组成:主程序、定时采样程序和DSP与周边资源的数据交换程序。
3.2.1 主程序
主程序内完成系统的初始化,I/O接口控制信号,DSP内各个控制模块寄存器的设置等,然后进入循环程序。
3.2.2 定时采样程序
定时采样程序是整个伺服控制程序的核心,在这里实现电流环、速度环的采样以及矢量控制、PWM信号生成、各种工作模式选择和I/O的循环扫描。其中,每个采样周期完成电流环的采样,开关信号的输出,速度环和位置环控制。PWM控制信号采用规则采样PWM调制方法生成,在每个采样周期中对每相电流进行一次误差判断以决定下个周期开关管的占空比。
3.2.3 数据交换程序
数据交换程序主要包括与上位机的通信程序,EEPROM中参数的存储,控制器键盘值的读取和显示程序。其中通信采用串行通信接口,根据特定的通信协议接受上位机的指令,并根据要求传送参数。键盘每隔0.2ms扫描一次,更新显示。
4 试验结果
上述伺服系统采用交流永磁同步伺服电机,其额定功率2.5kW,额定电流10A,额定转速2000r/min,额定转矩6N・m,定子电感8.5mH,定子电阻2.8Ω。图3为空载下电机额定速度的起动波形,通过仿真获得。图4是定子电流的dq分量起动波形,通过仿真获得。图5是空载起动时的B相电流波形。图6是电机带载稳态运行时的B相电流波形。
图3 空载下起动转速波形(仿真)
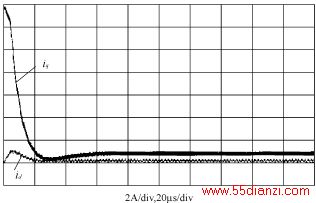
图4 定子电流的dq分量波形(仿真)
图5 空载起动时定子B相电流波形(实验)
图6 稳态运行时的B相电流波形(实验)
仿真和实验结果表明该系统具有较快的动态响应和较高的控制精度,完全能够满足伺服系统的要求。并且该系统已经成功地应用于数控车床的伺服控制系统中,性能良好。
5 结语
本系统硬件上采用DSP的控制结构,电路设计简单,紧凑,满足了系统矢量控制的要求,同时,全数字化的控制使系统在控制精度,功能和抗干扰能力上都有了很大的提高。其次,在充分利用DSP内部资源的条件下,只须附加很少的电路元件,即可实现系统预定的功能,其低成本,高性能的控制特性使该系统具有很好的市场应用前景。另外,系统软件结构的合理设计也保证了系统的实时性和稳定性。
上一篇:基于单片机的智能稳压电源






