本文针对传统PI调节器对交流控制系统会产生静态误差和动态调节能力弱的问题,基于伺服控制系统中的直流调节器转交流调节器的理论,将一种新型交流调节器引入到逆变电源控制系统的调节器环节,对实际工程应用中高增益频带过窄问题进行了分析,并介绍了改进措施和参数选取依据。通过设计基于该交流调节器的400 Hz单相逆变器的实验,验证了采用该方法得到的交流调节器可消除静态误差并具有快速的动态调节特性。
1 引言
关于逆变器控制技术,传统逆变器采用电压有效值外环控制,只能实现输出电压有效值的恒定控制,不能保证输出电压波形质量,并且在非线性负载条件下,输出电压谐波含量大且波形严重失真。同时,电压有效值外环控制的动态响应速度较慢。其原因是传统PI调节器只能对直流信号做到稳态时的零误差调节。
为实现供电设备稳态精度高、动态响应快的优良性能,现代逆变电源大多采用瞬时值反馈控制,解决了系统动态响应较慢的问题。但这种控制方法的给定信号和输出信号都是正弦交流信号,若直接使用传统PI调节器依然存在稳态误差。因此需要寻找一种静态交流调节器,它能直接作用于交流信号,并能获得零相位和幅值的误差。基于上述分析,将伺服系统中直流调节器转交流调节器的理论应用于逆变器的控制系统,提出一种新型静态交流调节器,并将其应用于400 Hz单相逆变器的控制,通过实验验证了该调节器动态响应快且可以消除交流控制系统中的静态误差。
2 交流调节器设计
2.1 交流调节器原理
交流控制系统是将系统的工作频点从零频率点移到某一频率点ω=ωo的控制系统。对于交流控制系统调节器的要求:调节器仅对交流误差信号的调制信号进行调节,而不影响其载波信号相位。即若调节器不影响载波信号的初相位,将达到仅调节交流载波信号的幅值而不改变其初相位的控制效果,那么此调节器可作为交流调节器使用。
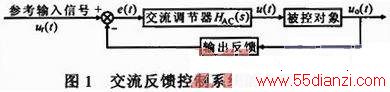
如图1所示,设交流误差信号为:
e(t)=Em(t)sin(ωot) (1)
式中:Emt)为调制误差信号,它是一个频率成分丰富的低频段信号。

由式(6)可见,若获得了针对ejωit的直流控制系统调节器HDC(jωi),则可得相应的交流调节器HAC(jωi)。因此,交流控制系统调节器的设计方法为:设计直流控制器HDC(jωi),通过式(6)获得相应的交流控制器HAC(jωi),用于交流控制系统的设计。然而,在复频域中由式(6)求解HAC(jωi)比较困难,为方便获得HAC(jwi)有以下定理。
定理:对于线性交流反馈控制系统,在系统调制信号频带内的有效最高频率ω1远小于载波信号频率ωo时,若存在满足相应直流控制系统要求的调节器HDC(s),则存在满足相应交流控制系统要求的交流调节器:
![]()
使系统输入交流信号,仅具有对其幅值调节的作用,而对载频相位无影响。此处将式(7)代入式(6)也成立,亦证明了定理的正确性。
2.2 交流调节器改进
若设计得到的PI调节器的传递函数为:
由式(10),(11)可见,调节器在其基频处有无穷大增益;对于基频点外的频率,其增益值下降较大。由于采用模拟器件实现交流调节器难以达到应有的精度,通常用数字方法实现。而数字实现时由于截断误差等因素,易使ωo偏离指定工作频率点,频率的微小波动使调节器增益变化较大,进而引起系统波动。为增大调节器的高增益带宽,提高系统稳定性,采用其改进模型:
根据实际工程造成的频率误差,确定所需的高增益带宽为2△ω;同时定义:m为增益相对值,其值越接近于1,增益波动越小。其表达式如下: 3 基于交流调节器的逆变器设计
3 基于交流调节器的逆变器设计
图2示出双闭环单相逆变器的控制结构图,其原理图如图3所示。
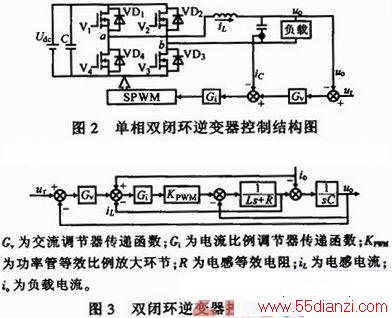
由图3得逆变器的输出传递函数为:
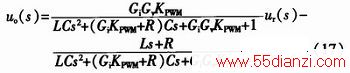
逆变器系统中,根据输出功率、电压幅值和频率选定开关管器件和滤波器后,数学模型中等效参数KPWM,R,L,C,fo可认为是定值,基于实验参数的等效取值Gi(s)=10,KPWM=40,R=0.2 Ω,L=0.7 mH,C=15 μF,fo=400 Hz。由于Gi可与KPWM等效为一个比例环节。因此,Gv应用于逆变器系统需确定ωc,kp和ki这3个参数。
(1)ωc的参数选取实际工程中,通常△ω≤3π。为减小增益的波动,m应尽可能接近于1,设0.9≤m<1,由![]() 得ωc≥8.1π rad/s,实验取wc=10π rad/s。
得ωc≥8.1π rad/s,实验取wc=10π rad/s。
(2)kp和ki的参数选取 由式(17)得双环逆变器系统的闭环特征方程:
在稳定域内,当kp的取值较小时,ki的取值范围较大;当kp的取值较大时,ki的取值范围较小。为运用DSP实现调节器的数字化,采用双线性变换对调节器传递函数进行离散化:
实验中采样频率为8 kHz,T=0.125 ms,将调节器的设计参数和采样周期代入式(22)的系数,通过y(n)=[114.8e(n-2)-234e(n-1)+130e(n)-4.08y(n-2)+7.8y(n-1)]/4.11可在DSP中进行编程实现数字化调节器。
4 实验结果及分析
在理论分析和设计的基础上,设计115 V/400 Hz,1.5 kW单相逆变器进行实验验证,采用TMS320LF2407A型DSP芯片进行瞬时值控制并实现数字化的交流调节器,并采用外环为电压环、内环为电流环的双环控制结构,LC滤波电感L=0.7mH,电容C=15μF。实验波形如图4所示。
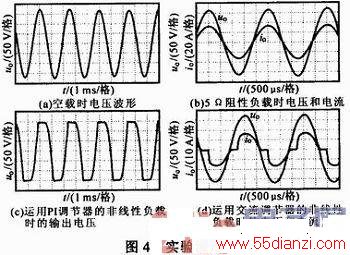
由图4a,b和图4d可见,所设计的逆变器具有良好的输出特性和带载能力;通过图4c与图4d的逆变器带非线性负载的性能对比,验证了交流调节器具有消除稳态误差和快速的动态调节能力。
5 结论
针对PI调节器应用于交流系统无法消除静态误差和动态调节速度慢的问题,将伺服系统中直流调节器转交流调节器的理论应用于逆变器的控制系统,提出了一种新型静态交流调节器,对其实际应用中存在的频带过窄问题进行了分析,并提出了相应的改进措施。再将其应用于逆变器控制系统,详细分析了交流调节器的参数选取问题。通过将其应用于400Hz单相逆变器控制系统,证明了静态交流调节具有消除静态误差和动态调节速度快的优良特性。
上一篇:无变压器UPS的设计






