纵扭型压电超声电机的设计及有限元分析
孙合明1,赵淳生2,朱晓东1,
(1.东南大学火电机组振动国家工程中心,江苏 南京 210096;
2.南京航空航天大学超声电机研究中心,江苏 南京 210096)
摘 要:介绍了纵扭复合型压电超声电机的工作原理,分析了定子驱动表面质点的运动轨迹,并对电机的一种结构进行了详细的有限元分析,最后对电机进行了扫频实验。电机的机械性能实验表明电机的最大扭矩达0.25Nm。
关键词:超声电机;有限元;扭矩;压电
1 引 言
超声电机是一种利用逆压电效应实现机电转换新型驱动装置。目前,目本已研制出各种各样的超声电机[1,2,3]。针对机器人的要求,日本正在研究大力矩纵扭型超声电机。在东京工业大学精密和智能实验室已开发了40Nm的纵扭复合型超声电机,该实验室正在研究力矩可达100Nm的纵扭型超声电机[4]。我国纵扭型超声电机的研究刚刚起步,国内高校开始研制自己的超声电机。南京航空航天大学设计了一种该型电机,本文从原理、结构的有限元分析到实验对该型电机的设计进行了介绍。
2 电机的结构及工作原理
图1所示是这种新型原理电机的结构图。定子和转子用碟簧紧紧地夹在一起。提供压力使定子和转子间产生大的静摩擦力。定子中安置有用于分别激发纵、扭振动的压电陶瓷片。定子同时作同频率的纵向振动和扭转振动。定子往复地伸缩纵振的作用是通过使定子、转子接触和分离,靠摩擦力抽取定子单方向的扭转振动,保证转子单方向转动。
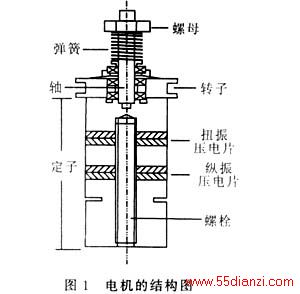
纵振压电片由两片各2mm的压电圆环组成。扭振压电片由两层层厚2mm的压电圆环组成,每一层压电圆环由8个等分的扇块构成。压电片通过定子的金属块体共用一个地极。
3 电机驱动端质点的运动轨迹
电机定子驱动端上各质点的运动轨迹是两种运动的合成,了解质点椭圆运动的产生有助于深入认识超声电机的运动机理。
图2可以帮助理解质点的椭圆运动轨迹的形成。纵振压电陶瓷产生的力FL使定子作纵向振动,定子驱动端面的质点产生纵向位移;扭振压电陶瓷产生的力FT使定子作扭转振动,定子驱动端面的质点产生周向位移。两位移的方向相互垂直,可以表示在一个平面内。
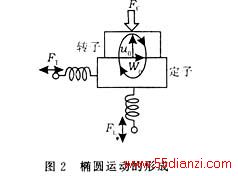
当在电机上分别施加二相同频率、不同相位的激振电压时,电机定子驱动端质点就会产生存在相位差的纵向振动和扭转振动,质点的运动是这两种运动的合成。用u代表端面质点的纵向位移,用W代表质点的扭转位移,则在定子驱动端质点的运动可表示为:

式中,ω为激振频率,Φ为纵振位移和扭振位移的相位差,u0、W0分别为纵振位移和扭振位移的最大值。
展开式(1):

这就是定子驱动端质点纵振位移和扭振位移的相位差为Φ时的运动轨迹。分别令Φ取不同的数值,得到不同的运动轨迹。
当Φ为π/2或-π/2时,质点的运动轨迹方程可以简化标准的椭圆轨迹:

但是质点运动的方向相反。因此,通过改变Φ的大小可以控制电机的正转和反转。
另外,由式(4)可以看出,定子输出端面质点的运动轨迹为一规则椭圆。其长短轴分别为质点在纵向和周向的位移最大幅值u0和W0。由此可以得出,分别改变二相激振电压的大小,就可以改变定子输出端面质点的椭圆的大小,从而可以控制电机的输出特性。
当Φ为其它数值时,质点的运动轨迹是不规则椭圆运动。
通过上面的分析,改变Φ的大小可以改变转子的旋转方向,改变电机的输出特性。通过改变输入到纵振压电陶瓷和输入到扭振压电陶瓷上电压的相位差φ,就可以改变定子驱动端质点纵振位移和扭振位移的相位差Φ。实际上,由于纵振波和扭振波的波速不同,定子中存在断面,φ不会等于Φ。针对不同的电机,要调节二相输入电压的相位差,使电机定子驱动端质点纵振位移和扭振位移的相位差为π/2。
4 定子的有限元分析
材质均匀的等截面直杆作纵向自由振动,杆在自由状态下固有频率为[5]:
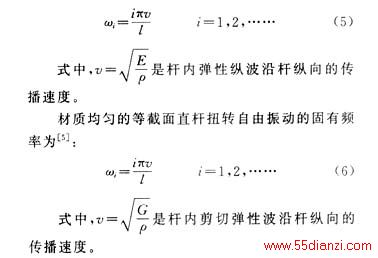
对于采用同一材质的等截面直杆,剪切模量G总是小于杨氏模量E,所以杆对应的纵振频率不可能等于扭振频率。杆必须采用其它的型式,如采用变化的横截面或杆由两种或两种以上不同材质组成,才可能令杆对应的纵、扭共振频率趋于一致。
式(5)、(6)适用于细长等截面直杆。当杆件又短又粗时,用公式算得的频率不再准确。另外,对于变截面的杆件,其固有频率和振型没有解析解,只能采用数值计算的方法求得杆件的固有频率和振型。所以后面全部采用数值法――用有限元软件ANSYS对固有频率和振型进行计算。
等截面直杆对应的纵振频率和扭振频率是不相同的。按频率由低到高排列,一般的顺序为:第一阶扭振、第一阶纵振、第二阶扭振。为保证工作频率的接近,若采用第一阶扭振模态和第一阶纵振模态,就必须选用合适的结构令第一阶扭振上升或/和第一阶纵振频率下降;若采用第一阶纵振模态和第二阶扭振模态,就必须选用合适的结构令第一阶纵振上升或/和第二阶扭振频率下降;若采用其它的组合方式,也要选用合适的结构型式。
考虑采用第一阶扭振模态和第一阶纵振模态的组合。由于第一阶扭振频率低于第一阶纵振频率,采用的结构型式必须在不降低扭振频率的条件下能降低纵振的频率。图3所示是带径缩的加长结构型式。由于存在径缩,加长后的第一阶扭振频率变化很小,但直杆的加长降低了纵振频率,这样可以令加长后变截面杆件的第一阶扭振频率和第一阶纵振频率接近。扭振阶次按直杆主体未加长部分的阶次命名。采用空心结构及45#钢,几何参数为:
h1=0.05m h2=0.001m h3=0.01m
r1=0.003m r2=0.005m r3=0.01m
算得的频率为:
第一阶纵振36.584kHz
第一阶扭振36.789kHz
长度为(h1+h2+h3+2h)的等截面直杆的各阶频率为:
第一阶纵振 51.690kHz
第二阶扭振 34.013kHz

直杆加长后,第一阶扭转频率仅变化了2.776kHz,而第一阶纵振频率变化高达15.106kHz。可见,径缩式定子确实可以令加长后的定子第一阶扭振频率变化不大而第一阶纵振频率急剧下降,从而使第一阶扭振频率和第一阶纵振频率趋向一致。
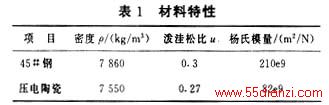
由于压电陶瓷在电机中占的比重小,可把压电材料按各向同性材料处理。有限元分析中用到的材料特性参数如表1所示。
设定要达到的第一阶纵振频率和第一阶扭振频率为35kHz。经过对电机各参数的调整,最后计算得到的频率为:
第一阶扭振33.926kHz
第一阶纵振34.976kHz各参数为:
h1=0.013m h2=h3=0.005m h4=0.001m
h=0.004m h5=0.013m r1=0.005m r2=0.01m
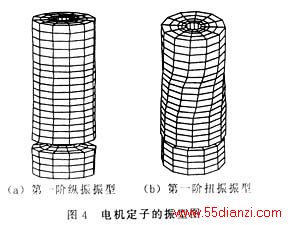
图4是定子的振型图。采用20节点体单元。
5 实 验
采用阻抗法测量定子的共振频率。定子压电陶瓷片输入电压幅值一定、频率变化的交流电压,定子的阻抗随输入电压频率的变化而变化。在共振频率频段,定子的阻抗变小,流过振子的电流变大。如果在电路回路中串联一个电阻,电阻两端的电压会变大。记录下电阻两端电压幅值和相位随输入电压频率的变化,就能得到定子的共振频率。图5是扫频原理图。
扫频得到的模态频率、有限元法计算的频率、目标频率的对比列于表2中,可以看出,电机结构选择和有限元计算的正确性。

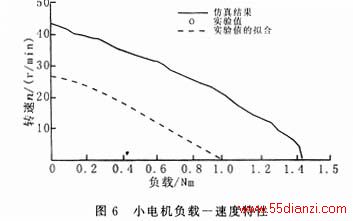
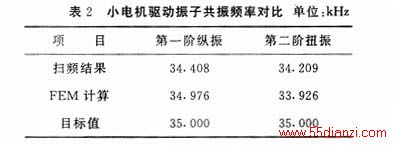
图6是小电机输出扭矩玫转子转速之间的关系。施加在转子上的预压力为300N,施加在纵振压电片和扭振压电片上的电压峰-峰值均为300V,电机的最大输出扭矩为0.25Nm。
从图6中可以看出电机的转速随电机负载的增加而下降。电机最大扭矩和无负载转速的实验值均比仿真值小,这是因为电机的性能还要继续提高,有些工艺问题没有解决,例如电机各部件的接触界面需要精细加工,定子和转子的接触界面没有贴摩擦材料等。
6 结语
纵扭型超声电机要求其工作的纵振频率和扭振频率一致或接近,由于等截面直杆的纵振频率和扭振频率不相等,必须对电机定子的结构进行设计。有限元分析在电机结构设计中是必不可少的。本文通过有限元分析,设计的电机定子两个工作频率十分接近,扫频实验也验证了设计的正确性。电机的研制成功为大直径、大扭矩该型电机的研究打下了基础。
参考文献
[1] Minoru Kurosawa,SadayukiUeha.Hybrid Transd-ucer Type U1trasonic Motor[J].TEEE,Transactionson U1trasonics Ferroelectrics and Erequency Control 1991,38(2),193-198.
[2] Yoshiro Tomikawa,KazunariAdachi,Manabu Aoy-agi,et al.Some Constructions and Characeristics ofRod Type Piezoelectric U1trasonic Motors UsingLongitudinal and Torsional Vibrations[J].IEEE,Transactions on U1trasonics,Ferroelectrics and Frequency Control,1992,39(5),600-607.
[3] M.Aoyagi,Y.Tomikawa.New Control Method ofContact Force Between Rotor and Stator on Rod-Type U1trasonic Motor[J].IEEE U1trasonics Symposium,Japan,1998,559-563.
[4] Jun Satonobu,Norikazu Torh,Kentaro Nakamura,etal.Construction ofMegatorque Hybrid TransducerType U1trasonic Motor[J].Jpn.J.App1.Phys,1996,35(9),5038-5041.
[5] 胡海岩.机械振动与冲击[M].航空工业出版社,1998,142-147.
本文关键字:电机 有限元 电工文摘,电工技术 - 电工文摘






