这里我们引入广义渡越点的概念,定义模糊增强算子的阈值为![]() (而非通常的0.5)。从隶属函数的定义可以看到,当Pij=PC时 ,可以得到两个广义渡越点Xc1和Xc2。
(而非通常的0.5)。从隶属函数的定义可以看到,当Pij=PC时 ,可以得到两个广义渡越点Xc1和Xc2。
图1为本文算法模糊增强后的图像X′与原图像X的关系曲线图。
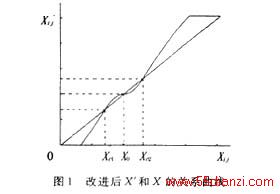
分析图1,可以看到:对于Pij<PC的区域(XOO两侧、界于Xc1和Xc2之间),由于增强作用 ,象素的灰度级向XO靠近;对于Pij>PC且Xij<XO (即Xij<Xc1)的区域,象素的灰度级被减小,而对于Pij>PC且Xij>XO(即 Xij>XC)的区域,象素的灰度级增强。因此,该模糊增强算子通过对图像不同区域采用不同的增强处理,即低灰度区域进行衰减运算、高灰度区域进行增强运算、边缘区域进行集中运算,提高了图像区域之间的对比度,强化了图像的边缘信息,从而使经过增强后的图像不仅保留了原有图像的信息,而且各区域之间的层次也比较清晰。
由此,我们给出改进的模糊边缘检测算法的步骤如下:
步骤1:用式(5)进行G变换,即将待处理图像X(M×N个象素、L级灰度)从灰度数据空间转换到模糊空间。
步骤2:用式(6)进行P到P′的变换,完成模糊增强处理。
步骤3:对P′进行G-1变换,从而得到经过模糊增强后的图像X′。逆转换G-1定义为:

步骤4:使用“min”算子提取边缘,得到边缘图像。
3 实验结果及分析
为验证改进算法的有效性,本文对两幅图像进行了仿真实验(为清楚起见,本文对图像边 界图均做了反色处理)。
实验1:分别用Sobel算法、PalKing算法和本文的改进算法对一幅256×256象素的256级 灰度图像(如图2(a)所示)作边缘检测实验,其检测结果如图2(b)、(c)、(d)所示 。
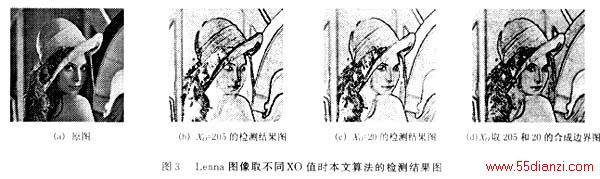
实验2:根据图像的灰度分布,取不同的值作为饱和增强点,并取广义渡越点与饱和增强 点相差5个灰度级,用本文的改进算法对一幅256×256象素的256级灰度图像(如图3(a)所 示)分别进行边缘检测实验。其检测结果如图3(b)、(c)所示,图3(d)为图3(b)、(c)的合成边界图像。
从实验1的结果看,在三种算法中,本文改进算法的检测结果最理想,它不仅清晰地勾画 出近处摄影师和摄影机以及远处建筑物的整体轮廓,同时也依稀检测出摄影师右手的轮廓和裤 角的皱褶。PalKing算法次之,它可以清晰地勾画出近处和远处物体的轮廓,但无法检测 出较为细小、模糊的边缘。Sobel算法的检测效果最差,它甚至不能检测出原图中远处建筑物的整体轮廓。在检测 速度方面,用MATLAB5.3编程,本文算法的运行时间为36 s,而Pal King算法的运行时间 为62 s(迭代次数r=2时)。上述结果表明:在检测速度和质量方面,本文算法均优于P alKing算法。
在实验2中,当饱和增强点XO=205时(取值较大),除人物和背景的整体 轮廓外,原图中较亮区域的细节边缘(如草帽的编织纹理)也能被检测出来;而当饱和增强 点XO=20时(取值较小),除人物和背景的整体轮廓外,原图中较暗区域的细节边缘 (如 Lenna的发梢以及草帽上的装饰物等)也被检测出来。由此可以看出:选择不同的XO值,意味着对图像中不同的灰度区域做增强处理,因而图像边缘检测的结果也将不同。但XO值的选择只影响图像细节边缘的检测结果,对提取图像的主干边缘影响不大。在实际 运用时,可以考虑采用 图像分割中的阈值选取方法来确定饱和增强点XO;显然,XO应在图像直方图的某个谷底附近。其具体值的大小,可以根据图像的不同灰度特征(偏暗或偏亮)以及边缘检测的不同要求(提取较亮区域的细节边缘或提取较暗区域的细节边缘)来合理确定。对于灰度层次丰富、包含多个边缘、且各边缘象素点灰度值相差较大的图像,我们可以选取不同的XO值来处理图像,并将各结果进行合成,最终得到较为理想的边界提取效果(如图3(d)所示)。

4 结语
以上实验表明:本文的改进算法不仅克服了PalKing算法的不足,具有快速、简便、性 能 优良的特点,而且具有较强的灵活性和适应性。它可以对图像的不同灰度区域做增强处理, 从而既能提取图像的主干边缘,又能实现对细小、模糊边缘的提取。因此,本文的改进算法是一种更为实用、方便的图像处理算法。
参考文献
本文关键字:暂无联系方式电工文摘,电工技术 - 电工文摘
上一篇:PI系列总线及其应用






