王立欣,王明彦,齐明
(哈尔滨工业大学电气工程及自动化学院,黑龙江 哈尔滨 150001)
摘 要:进行故障诊断必须首先确定诊断参数及其测试方法。该文用仿真试验的方法研究了电机定子绕组匝间或相间短路、转子断条和转子轴偏心等各类故障。讨论了故障对电机电磁、振动和声学性能的影响。建立了包括直接故障及其条件故障在内的电机故障模型。利用逻辑诊断方法,借助布尔矩阵确定了最小诊断试验集及相应的监测参数。通过对绕组电压和电流中三次谐波的监测能够在故障初期和在运行条件下确定故障类型,提出的算法能对电机的技术状态做出快速判断。
关键词:电机;故障诊断;逻辑方法
1 引言
现有的电机监测和诊断方法,用于运行中电机时效果并不理想。主要问题在于对电机的故障研究不够充分,没有找到能够正确表征故障电机电磁、振动和声学性能变化的诊断参数。文献[1]~[3]就此问题作了具体研究,认为明确需要监测的参数有利于提出新的有效的诊断方法,并应用技术诊断学的基本原理解决电机的诊断问题。
本文研究了应用逻辑诊断方法在电机运行过程中监测其技术状态并获得诊断信息的可行性。电机的动态性能是其电磁、振动和声学过程的总体反映,在电机的各个主要功能部件(包括定子、转子、铁心、气隙、轴承组件)之间存在着紧密的电磁和机械联系,它们的状态互相影响。某部件的损坏(直接故障)在其它诊断相关部件(如果第一个部件的故障引起第二个部件确定的故障,这两个部件是诊断相关的)中会引起条件故障[4]。条件故障包括气隙中电磁场均匀性被破坏,定子绕组电流中出现高次谐波,气隙磁势不均匀等。所有故障都将引起相应参数的变化,而参数的变化可以通过试验监测。逻辑诊断就是在对故障充分分析的基础上,确定诊断试验项目和监测参数,再根据试验结果对电机的状态作出判断。
2 逻辑诊断方法
电机的状态可以用参数和特征的集合来描述,设:向量X(x1,x2,K,xn)外部激励输入,向量Y(y1,y2,K,ym)为电机的动力学指标,Z(z1,z2,K,zk)为参数或特征向量,则试验结果
R=f(Xg,Yg,Zg,t)
为以某种形式(表格、表达式等)给出的正常状态的模型。该模型表征诊断试验结果与激励、动力学指标及状态参数之间的关系。
运行实践表明,在故障初期,电机的主要动力学指标仍保持原值,只有明显损坏时它们才显著变化。考虑到这一点,在正常激励下,当出现第i类故障时,故障模型为![]()
其中Zs(i)表征第i类故障下损坏部件的状态变化;Zs(j/i)表征i类故障导致的第j类条件故障引起的其它部件的状态变化。所以,当第i类故障出现时电机中的故障集为![]() <![endif]>
<![endif]>
故障集及条件故障集可以用相应的诊断参数或特征的集合来描述:
![]()
根据故障的诊断参数,可以确定相应的诊断试验,假设诊断参数和试验结果都只有“0”和“1”两种取值,则可以建立电机状态的具有逻辑性质的数学模型――布尔矩阵。表1为由各种故障下不同诊断试验的结果组成的布尔矩阵[5]。

用布尔矩阵建立最小的诊断试验集就是找到最小的列集合,使得在每一行中至少有一列为“1”。例如,对于故障S(i)最小试验集记为
即某试验(πi)结果不为0或某诊断参数Zi=1,则发生了故障S(i)。
3 电机的典型故障分析
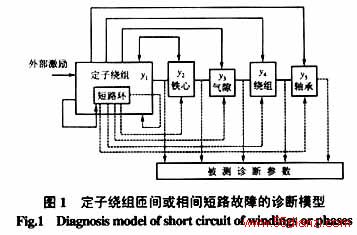
3.1 定子绕组的匝间或相间短路故障
图1给出了交流电机在发生定子绕组的匝间或相间短路故障时的诊断模型,故障部件对其它部件的作用用箭头表示,而短路环流的作用用虚线表示。匝间和相间短路的基本标志是绕组局部过热,各相电流不对称,噪声和振动加剧。但是只有在故障的终了阶段,短路环流达到一定数值,即电机就要退出运行时这些现象才表现得非常明显。在故障初期需用参数的变化来诊断。定子绕组的匝间或相间短路将引起下列参数的变化:
(1)三次谐波电流的不对称
已知定子上每相绕组的磁势是空间分布不变,随时间变化的各次谐波的总和
![]()
正常情况下,由于三相绕组是对称的,三次谐波的电流产生的总磁势为0。当出现匝间或相间短路时,三相中谐波产生的磁势不对称,在气隙中出现了频率为基波3倍(3f1)的磁势,它沿基波的方向旋转,并在绕组中产生频率为3f1的电动势
![]()
故障情况下绕组中形成的短路环导致三次谐波发生局部补偿,致使故障绕组中三次谐波减小。随着故障的发展,三相电流的不对称程度加剧,气隙中三次谐波的合成磁通量增加,导致非故障绕组中三次谐波电流增加。
(2)故障相参数的基波减小
在同步电机中短路环流可用感性负载等效,它将引起定子的附加电枢反应,并对基波激磁磁通产生影响[6]。尤其在空载条件下,这种现象尤为明显。因为故障电机在空载运行时,定子相电流为0,电枢反应只由短路电流引起。电枢反应产生的磁势幅度为

式中 wk为在故障绕组中的短路匝数;Ik为短路环中的电流。
短路情况下,短路环流具有电感特性,它引起的电枢感应磁通对激磁磁通产生纵向去磁作用。因此在给定的激励下绕组中的感应电动势将减小。
对18.5kW同步电动机(D接法)和12.8kW同步发电机(Y接法)所做的匝间和相间短路试验结果表明,匝间短路使故障绕组C,B相的三次谐波电流减小(发生局部补偿),发生相间短路的A,B和B,C相的三相谐波电流减小,同时未损坏绕组中的三次谐波电流增加。同步电机中在给定的短路环流下,基波将比正常绕组中的数值减少15%,同时相电压减少3%。
(3)振动和噪声参数的变化
通过试验,确定了定子绕组匝间和相间短路对振动幅度、速度、加速度、噪声平均水平及各参数谐波成分的影响。表2中列出了某18.5kW电动机部分试验数据,表3中给出的是振动加速度波形的处理结果。

3.2 转子断条故障
对同步电机因转子断条引起的故障进行了试验研究,采用在转子槽中钻孔的方法模拟故障,测量相电流和谐波成分的波动。试验表明与基波相电流相比三次谐波的波动幅度要大2.5倍,这是对鼠笼式同步电动机进行故障监测的最有效的特征。
3.3 转子轴偏心故障
轴偏心会破坏相电流的对称性,影响定子绕组电压和并联支路电流分配的均匀性,并导致附加谐波的出现,而且谐波幅度相对于基波不均匀地增加,同时差动杂散感抗和输入阻抗Zk增加。在气隙均匀的情况下,相电压中的三次谐波分别为0.47%(A)、0.42%(B)、0.47%(C),而在偏心率e =75%时,三次谐波将不均匀的增长许多倍,达到5%(A)、4.1%(B)、8.1%(C)。
4 逻辑诊断试验
每一个参数或特征Zi可以借助相应的试验pi监测,针对上述故障类型,为进行逻辑诊断,应进行下列试验:p1―定子绕组(电压或电流)中三次谐波(Z1)的监测;
p2―三次谐波脉动量(Z2)的监测;
p3―某相绕组三次谐波局部补偿(Z3)的监测;
p4―两相绕组间三次谐波的局部补偿(Z4)的监测;
p5―相参数中基波成分减少与否(Z5)的试验测试;
p6―各部件振动幅度(Z6)的监测;
p7―振动速度(Z7)的监测;
p8―振动加速度(Z8)的监测;
p9―平均噪声水平(Z9)的监测;
p10―振动速度v(t)、加速度a(t)各次频谱系数绝对值之和(Z10)的分析试验;
p11―噪声L(t)的各次频谱系数绝对值之和(Z11)的测试;
p12―定子绕组阻抗(Z12)的测试。
在故障集中暂时只考虑前已述及的几类故障:
Se―气隙不均匀; Sbr―转子断条;
Ssc―定子绕组匝间短路;Ssp―定子绕组相间短路。
针对上述故障和诊断试验,电机的布尔矩阵见表4。在行和列的交叉点上用数字“1”和“0”示出了实际监测结果,“1”代表参数在相应的试验中对故障是肯定响应,“0”则相反。“x”表示无关项。
不难看出,为进行故障诊断需做的试验由下列各式确定:
![]()
利用上面各式中列举的所有试验来诊断相应故障是很烦琐的,也是不经济的。应建立最小诊断试验集。如前所述,在矩阵中找到最小列组合,使每一行中至少有一个“1”。试验p1~p4监测的都是相参数中的三次谐波,所不同的只是需分析的变化规律,所以可以只用一种试验,例如在矩阵中只保留p1,这样布尔矩阵可简化为表5的形式。

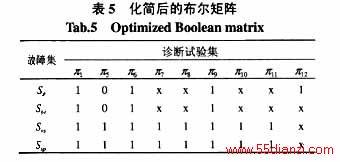
在该布尔矩阵中最小诊断试验集的解为
Tmin={π1}∪{π6}∪{π9}
虽然试验p6和p9对上述故障都能给出肯定的结果,但由于在没对布尔矩阵化简时,它们已经是最小试验集的解(也就意味着对多种故障,它们的表现是一样的),现有的研究水平尚很难根据p6和p9的试验结果具体确定故障类型,但用监测振动和声学指标变化的试验,可以对技术状态做出粗略诊断[7],即如果p6和p9的试验结果不为“0”,则电机中存在矩阵中所示四种故障之一,即
![]()
然后可以采用相参数中的三次谐波分量来进行精密诊断,因为它的变化特点唯一地与故障类型相对应。这样在最简布尔矩阵基础上得到的最小试验集就只包含一个试验p1,即
Tmin={π1}
根据p1的试验结果可以得到下面对诊断类型的判断依据:
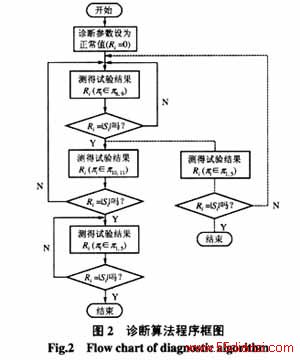
在上述研究结果的基础上提出并实现了诊断算法,算法的程序框图如图2所示,试验表明用该算法可以迅速对电机的状态做出判断,并在故障初期确定故障类型。
5 结论
(1)电机的各部件之间存在着紧密的电磁和机械联系,某部件的故障会引起其它部件的条件故障,并表现为电机电磁、振动及声学性能的改变。据此,可采用技术诊断学中的逻辑方法对电机的状态进行监测和诊断。
(2)在分析电机几种典型故障及其表现的基础上,提出了电机诊断的逻辑模型,列出了用于诊断的布尔矩阵,经化简求得的最小试验集中只有一项试验,根据三次谐波的变化情况可以确定电机的技术状态。
参考文献
[1] Fiorenzo F,Giovanni F,Carla T,et al.Recent developments of induction motor drives fault diagnosis using AI techniques[J].IEEE Transactions on Industrial Electronics,2000,47(5):83-87.
[2] Subhasis N,Toliyat H A.Condition monitoring and fault diagnosis of electrical machines-a review[C].Conference Record-IAS Annual Meeting,1999.
[3] Henao H,Martis C,Capolino G A.An equivalent internal circuit of the induction machine for advanced spectral analysis[C].Conference Record - IAS Annual Meeting,2002.
[4] Teodorescu R,Tataru A M,Lungeanu F,et al.Portable acquisition and identification tool for induction machine diagnosis[C].IEE Conference Publication n 456,1998.
[5] Zollner J M,Berns K,Dillmann R.Diagnosis of large inspection datasets using a adaptive learning system[C].IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems,2001.
[6] 沈标正(Shen biaozheng).电机故障诊断技术(Fault diagnosis technique of electrical machine)[M].北京:机械工业出版社(Beijing:China Machine Press),1996.
本文关键字:电机 电工文摘,电工技术 - 电工文摘






