ժ Ҫ�������ŷ�ϵͳ������ҵ��������õ��㷺Ӧ�ã�������λ���ŷ�ϵͳ����ɣ���Ҫ����������λ�û���PID���Ľ������㷨�Լ���������������ʵ��Ӧ�ñ�����ѡ�������PID�����ܹ��������ϵͳ��Ӧ�ٶȿ졢�ٶȾ��ȸߡ�³����ǿ��Ҫ��
�ؼ��ʣ������ŷ����ƣ������㷨��PID����
�����ŷ�ϵͳ������ҵ�����еõ��˸��ӹ㷺��Ӧ�ã��Կ��Ƶ�Ҫ����������Ӧ�ٶȿ졢�ٶȾ��ȸߡ����ٷ�Χ�����Ӽ������ܺá����ż�������������Ӽ�����������Բ��ϵIJ��Ϸ�չ�������ŷ�������Ϊ�����Զ����������˶����Ƶ�������1�����йظ������Ϳ����㷨����ӿ�֣�������Ӧ���ơ��ų�������Ƽ�ֱ��ת�ؿ��ơ����ܿ��Ƶȡ����ǣ���ͳ��PID���Ʒ�������ʵ�ֵķ���ɿ����������������㷨�Ļ�������
1 ϵͳ���ԭ����
ϵͳ������ṹ��ͼ1��ʾ��
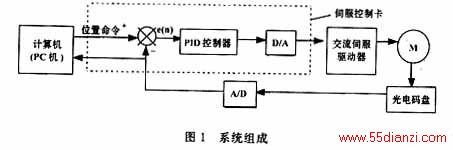
��ϵͳ���IJ�����ɣ��������ŷ����ƿ��������ŷ�����ϵͳ�����м�⡣����������ƿ�����������ͨ�������߷���λ�û��ٶ�����趨PID���ڲ�������������ģ��D/A��ת������ģ���źž��������ŷ��Ŵ����Ŵ�������ŷ��綯����������װ������ʽ������̣�ͨ����������ṩ�����źţ�A��B��IN���壩�����λ���ŷ�ϵͳ��λ�÷��������һ����ջ�ϵͳ��һ�㽫�������װ�ڵ���Ǹ����������ϣ����ڰ�װ�ͱ����е�����ͱ��ζ�λ�ÿ���ϵͳ��������Ӱ�졣λ�÷������д���Ԫ��������ʽ�����������˶�����ʵʱ��λ�ƣ���ת�ǣ��仯����A��B����������ʽ���ߴ��䵽�ֳ�����վ��PC�����н��б���������������Ի�����ֻ�λ����Ϣ���������������λ����ʵ��λ�ã�����������λ�ã���ƫ�����ƫ�Χ��ȡ��Ӧ��PID���Ʋ��ԣ������ֿ������þ���ģת�����ģ����Ƶ�ѹ����������ŷ��Ŵ��������յ��ڵ���˶����������ֵ�Ķ�λ����
2 �ŷ����Ʒ���
��ҵ�����г��õķ�����PID�����������������ִ��������ټ����ķ�չ�������˸������Ϳ����㷨��������Ӧ���ơ�ר��ϵͳ�����ܿ��Ƶȡ�2���������۷�����������Ʋ��Զ���ʵ�����õĵ������̬���ԣ����������㷨�����ĸ����ԣ����Ҷ�ϵͳ����ģ�ͱ�ʶ�Ƚ��鷳����ˣ���ʵ��ϵͳ��ʵ��ʱ���ѣ����ڴ�ͳ��PID���������ԣ��������ŵ������㷨�������������������н�ǿ��³���ԡ�3����������Ӧ��ǿ���ɿ��Ըߣ���Щ�ص�ʹPID�������ڹ�ҵ��������õ��㷺��Ӧ�á���������ϵͳ�еĿ��ƶ�����Բ������ӣ���PID����������ʵ��Ԥ��Ч������
2.1 λ�û�PID�����㷨
������PID���ڿ���ϵͳ�У�������ֻ��ڵ�Ŀ����Ϊ�����������߾��ȣ����ڹ��̵Ŀ�ʼ���������������趨ֵʱ����������ֻ��ۣ�����ϵͳ�ϴ�ij�����������������ŷ������������˵�Dz����ġ�Ϊ��С��������й����л���У���Կ���ϵͳ��̬���ܵ�Ӱ�죬���û��ַ���PID����������ʱ���������ʵ��λ��������λ�õ����С��һ��λֵʱ���ٻָ�����У�����ڣ��Ա�����ϵͳ����̬����
���ַ���PID�����㷨���趨���ַ��뷧�ţ���|e(k)|����ʱ����ƫ��ֵ�ϴ�ʱ������PD���ƣ����ٳ�������ʹϵͳ�нϿ���Ӧ����|e(k)|�ܦ�ʱ����ƫ��ֵ�Ƚ�Сʱ������PID���ƣ��Ա�֤�ŷ����λ�ÿ��ƾ��ȡ���
��ɢ��PID������ʽΪ��
���У�kΪ������ţ�k=0��1��2����Kp��Ki��Kd�ֱ��ʾ���������֡���ϵ������ʵ���У���ִ�л�����Ҫ���ǿ����������������ݵݶ�ԭ���ɵ�����ʽPID������ʽΪ��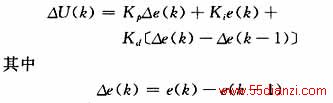
2.2
���Ĺؼ��֣��ŷ� ���齻�����繤���� - ���齻��
��һƪ��AN�����ڻ������ϵͳ�е�Ӧ��






