静止无功补偿器非线性控制对系统功角稳定的影响
点击数:7887 次 录入时间:03-04 11:45:20 整理:http://www.55dianzi.com 电工技术
0为同步角速度,
w0=2pf0= 314rad/s;
Pe为发电机的电磁功率;
Pm为发电机的机械功率;
D为发电机阻尼系数;
H为发电机惯性时间常数
(s);
x1,
x2为电抗参数;
E¢为发电机电势;
VC为无穷大母线电压;
BC为等效电容的电纳值;
BL为
SVC中可调电感的电纳值;
BL0为电纳
BL的初始值;
Kc为
SVC调节系统的放大倍数。这些量,除标明量纲的量外,其余均采用标么值。
根据图1可调电感支路电流Ic正方向的规定,有
式中
Vm为
SVC所在点的电压。
设计
SVC电压型非线性控制器,即要求系统的输出为
上式显含控制输入量
uB,因此令
 令z1=y,在上式的反馈补偿作用下,原系统式(6)化为
令z1=y,在上式的反馈补偿作用下,原系统式(6)化为
其中,虚拟输入量设计为 只要
只要 ,就能保证电压调节的稳定性;当
,就能保证电压调节的稳定性;当 足够大时,电压调节的速度能够满足工程应用的要求,因此,从理论上保证了控制器具有很好的鲁棒性。常规SVC调节器(比例调节)的放大倍数与系统初始运行点有关,只有当放大倍数在某一参数域内,系统才是稳定的,因而鲁棒性不能与非线性控制器相比。
足够大时,电压调节的速度能够满足工程应用的要求,因此,从理论上保证了控制器具有很好的鲁棒性。常规SVC调节器(比例调节)的放大倍数与系统初始运行点有关,只有当放大倍数在某一参数域内,系统才是稳定的,因而鲁棒性不能与非线性控制器相比。
4 信号调制型SVC综合非线性控制器设计
为深入了解SVC定电压控制对系统同步转矩和阻尼转矩对系统的影响,做如下分析。
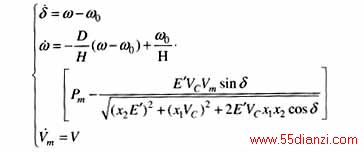
把发电机的经典二阶模型写成小扰动运动方程的形式
式中 θ为E'与Vm之间的相角差。
纯电压控制(无论线性或非线性)时最理想的情况是SVC装设点的电压能维持恒定,即
由此可求得
此式表明,SVC纯电压控制只能增加系统的同步转矩系数,不能同时增加系统的阻尼转矩。因此,要用SVC纯电压型控制器改善系统的功角稳定性是不可能的。为了增加系统的阻尼,就必须允许电压在某个范围内有一定的变化。
当Vm变化时,式(9)的小扰动增量为
则式(15)代入式(8)为
当K>0时,系统的阻尼增加。式(16)就是信号调制的基本思想,具体控制器设计如下。
系统的输出取
由此解得SVC的非线性反馈补偿规律为
此式即是信号调制型SVC综合非线性控制器。其中Kp是可调节的控制系数,调制信号q 可由SVC处的电流及电压观测而得,调制信号的微分以及二阶导数可由抗干扰能力很强的非线性跟踪—微分器获得[11]。
在式(21)的非线性反馈补偿作用下,有

由式(17)可见,信号调制型SVC综合非线性控制器对系统同步转矩系数的影响与纯电压控制是相同的,但它同时还增加了系统的阻尼转矩系数(q0不会超过90上一页 [1] [2] [3] 下一页
本文关键字:影响 无功补偿 电工技术,电工技术 - 电工技术






