1 引言
发电机励磁系统除了维持机端电压恒定和保证并联运行的机组间的无功功率合理分配外,励磁控制也是改善和提高电力系统稳定的最行之有效而又经济的手段之一。为提高大型互联系统的稳定性,一方面,基于现代控制理论的励磁系统最优控制[1]、非线性控制[2-3]、自适应PSS[4]等进行了大量的试验研究,有些还在实际中得到了应用。但非线性最优励磁控制与线性最优励磁控制一样,是基于被控对象的精确数学模型来设计的,它需要被控对象的精确模型来描述系统的非线性特性。理论上,这一类方法不具备对系统参数和参数不确定性的鲁棒性。在电力系统的实际运行中,存在着各种不确定性,如稳态运行时负荷的波动、故障引起的系统拓扑结构的改变等。电力系统的这种强非线性、时变性和不确定因素,使得难以建立电力系统的精确数学模型。
智能控制理论的发展,为解决复杂强非线性电力系统的稳定提供了一条途径。特别是模糊逻辑控制,由于实现简单,适应性强,可靠性高,自问世以来,不少人尝试利用模糊控制技术来增强PSS的鲁棒性[5-8],并已在电力系统中得到了实际应用[6]。文献[9]则尝试将模糊控制技术直接用于发电机的励磁控制。
对于一个模糊控制系统,模糊控制器的性能决定着该系统性能的好坏,而模糊控制器的自身性能又取决于模糊语言规则和合成推理,即与模糊控制器的控制规则设计和隶属函数的形状有密切的关系。在通常情况下,一个模糊控制器设计完成后,其语言规则和合成推理往往是确定的,即不可调整的。由于控制规则和隶属度是由人主观决定,不可避免带有不合理成分,且与设计者的个人经验密切相关,从而限制了模糊控制器的应用。
为简化模糊励磁控制器的设计,确保模糊控制系统对不同的扰动和不同的运行环境有较佳的适应性,本文探讨发电机励磁的直接非线性解析模糊控制。
2 自适应非线性解析模糊控制器
2.1 自适应非线性解析模糊控制器结构
为简化模糊控制器的设计,文献[10-11]给出的带调整因子的控制规则如下
![]()
这实质上是一种用解析规则表示的模糊控制规则。采用解析表达式描述的控制规则虽不如用语句表示的控制规则精确,但具有简单,易于实现的优点,特别适合实时控制系统。式(1)中,控制量取决于输入量E(误差)和EC(误差变化),a 为一个可调整因子,用来对误差和误差的变化进行加权,从而可根据误差大小和误差变化的大小来改变控制量,从而得到更好的控制效果。
为更好地反映非线性控制特性,在式(1)的基础上,引入非线性对称函数,取
则得到一个非线性的解析表达式描述的模糊控制器。控制规则由ac和ae进行调整。
自适应非线性解析表达模糊控制器如图1所示。图中,在比例输出环节串入一个一阶惯性环节有两个作用,一是可以拟制误差信号引入的高频干扰,二是可以防止在规则切换和参数调整时可能对被控对象造成的不必要的干扰。从而可提高系统的稳定性。T的取值不能太大,否则将降低系统的响应速度,从而影响系统的动态性能。
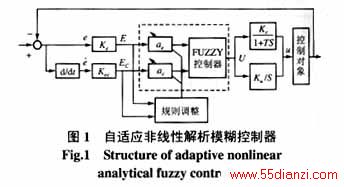
在实际控制过程中,当大的误差存在时,控制器的主要任务是尽快地消除误差,因此,此时对误差应给予较大的作用权系数;当误差较小时,控制器的主要任务是应避免超调,以使系统尽快地进入稳定,此时,应对误差的变化率予以更多的控制作用。当误差变化较大时,为增强系统阻尼,则需对误差变化加较大的权。在规则调整时,应同时考虑误差和误差变化率的大小,当误差和误差变化均较大时,采用较大的比例值和较小的微分值;当误差较小但误差变化率较大时采用较大的微分(对误差变化率加较大的权)和较小的比例值。根据这样的原则,设计误差及误差变化的自调整函数分别为

式中 ac0+ae0=1,它们分别为初始的误差和误差变化率的权系数。
2.2 自适应非线性解析模糊控制器的参数调整
对图1中所示模糊控制器,其输出不是控制规则集,而是模糊输入变量的代数表达式,当其输入量的隶属函数取为三角形函数时,其控制输出可以看成是输入变量的近似代数表达式,有

式中 k1和k2为模糊推理出的误差与误差变化的作用系数,DT为采样时间。
而由带实际微分的常规PID控制算法,可得
比较式(9)和式(10),两者具有相同的形式。 因此,图1所述的自适应非线性解析模糊控制器是一本质非线性PID控制器。在控制过程中, 当ac、ae、Ku、Kr不变,模糊推理的输出k1、k2产生变化时,模糊控制器实际上是一种变参数变结构控制器。当k1、k2不变,而ac、ae、Ku、Kr发生变化时,同样是一种变参数变结构控制器。
由此,可根据常规PID控制的经验对所述模糊控制器的参数进行调整。
3 发电机励磁系统自适应模糊控制
3.1 电压控制部分
发电机直接模糊控制器的原理框图如图2所示,它由电压控制和稳定性控制两部分组成。电压控制部分的主要任务是确保较高的电压调节精度,稳定性控制部分的主要任务是提供系统强的阻尼。通过在两个控制部分间的参数协调,达到同时改善电压调节精度和提高系统稳定性的目的。
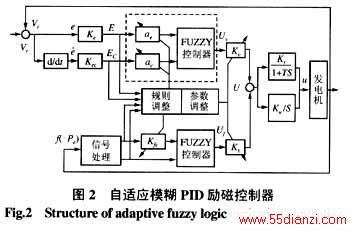
电压控制采用前述的模糊自适应PID控制的控制算法,控制规则的调整采用式(4)、式(5)计算;对控制参数,若已按常规方法确定了一组PID参数KP
本文关键字:发电机 电工技术,电工技术 - 电工技术






