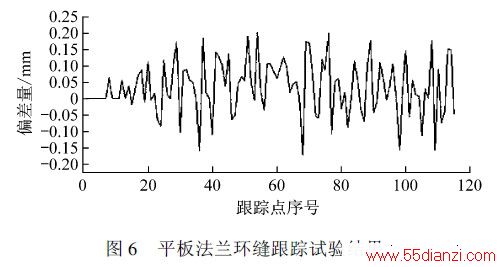
试验结果数据显示其跟踪误差略大于平板焊接, 最大误差达到了 0. 2 mm. 考虑到图像处理误差, 真实误差在0. 35 mm 内。
3 结语
以弧焊机器人在脉冲T IG 焊接过程中应用的需求为研究背景, 以被动视觉作为传感方式, 研究了实时焊缝跟踪控制技术, 并且在生产中得到验证:
( 1) 设计集成了焊接机器人系统, 将原有的“示教再现”型机器人成功改造成具有视觉功能的、能够实时自动焊缝跟踪的焊接机器人系统。
( 2) 设计了相应的图像处理算法, 能准确提取焊缝边缘并拟合焊缝中心线。
( 3) 提出了一种基于视觉的实时焊缝跟踪方法, 在保证焊接过程稳定的前提下研究了焊缝跟踪算法, 建立了适合焊接过程的模糊PID 实时焊缝跟踪控制器。 试验表明: 实时跟踪直线焊缝和曲线焊缝, 跟踪最大偏差分别可以控制在0. 3 mm 和 0. 35 mm 以内.
本文关键字:技术 传感器,电子学习 - 基础知识 - 传感器
上一篇:金属应变片式传感器






