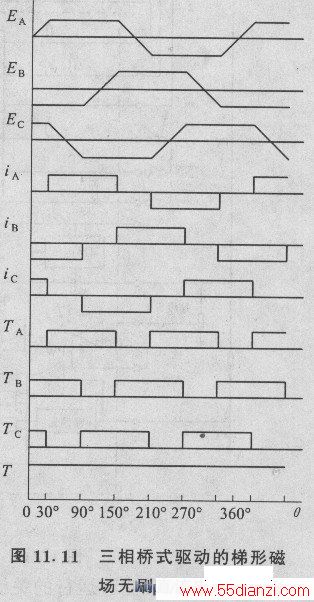
新型无刷直流电动机通过改进设计,采用如加大极靴宽度等措施使得气隙磁场分布为梯形。结合考虑三相桥式驱动的开关顺序,可以绘出三相Y接法的无刷直流电动机各相绕组中的反电动势EA.EB和Ec,电流iA、iB和IC,转矩TA. TB和Tc的波形(见图11.11)。从波形图我们可以注意到以下几点:
(1)反电动势取决于磁场的波形,因此为相隔120°的梯形波;
(2)各绕组导通时正处于梯形波磁场的平顶部分之下,得到的转矩为120°的方波;
(3)理论上合成转矩丁为当时导通的两相绕组转矩的代数和,得到的电动机转矩是几乎没有波动的恒定转矩。然而实现标准的梯形波磁场是不可能的,梯形波顶不可能完全平直;此外,电枢电流在绕组间的换向也不是可以在瞬时完成的,电流波形应该近似于梯形波,因此转矩的波动总是有的,特别是在换相的时刻会出现转矩的明显波动。
无刷直流电动机的动态特性与普通直流电动机在本质上相同,此处不再详细推导。
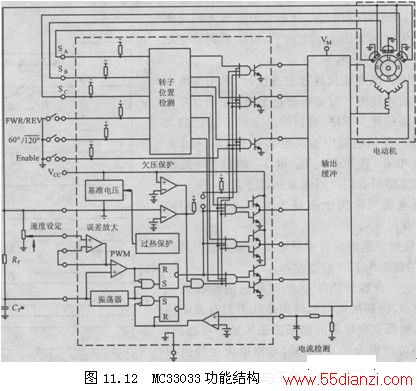
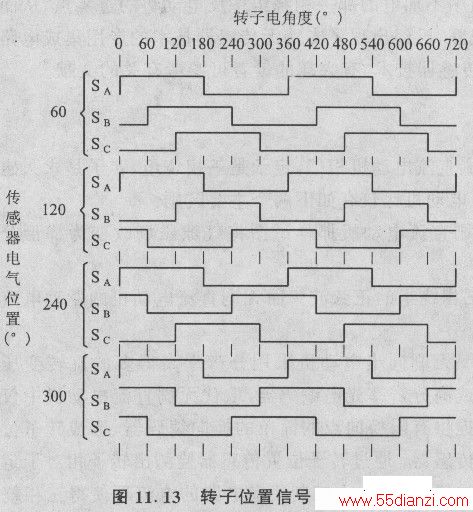
无刷直流电动机能够运行的关键是必须首先了解转子的位置,然后根据转子的位置信息来决定驱动器中的开关切换并实现电枢绕组的换相。因此转子位置检测是无刷直流电动机设计中不可缺少的组成部分。执行这种功能的一般是利用光学或霍尔传感器检测转子的位置的换向编码器。目前在无刷直流电动机中应用最多的是霍尔传感器。以三相电动机为例,三个霍尔传感器一般安装在对应定子磁极的中心位置,这三个传感器在电动机内圆上的位置则有电气相位差为60°、120°、240°和300°的4种惯例。芯片的三个传感器输入SA.SB和Sc能直接与集电极开路的霍尔效应开关或光电耦合器接口,内部的上拉电阻可减少外部元件数。4种惯例所产生的信号如图11. 13所示,它们都是高低电平各占180。的TTL电平信号。对于6步电动机来说,电角度每变化60。就必须产生一个信号的变动,因此在一个周期内,三个传感器信号的电平组成6个有效的三位代码(另有2个无效代码一般不会出现)。MC33033有一个输入引脚60°√120°用以选择传感器的相位差。另有一个FWR/REV输入信号选择正反转。在这5路信号的支持下,芯片内的解码器根据6个代码就可以确定转子的位置,并向驱动电路发出正确的换相信号。对于采用240°和300°惯例的电动机,我们可以注意到它们的输入代码序列分别与120。°和60°的序列相反,可以通过灵活地利用FWR/REV信号来解决正确的换相问题。
MC33033内部有一个锯齿波振荡器,参见图11.12,电容CT由内部基准电源通过电阻RT,充电,充到一定电平时即通过一个内部的晶体管放电,从而形成锯齿波。锯齿波的峰值和谷值分别约为4.1V和1.5V,而其频率则是由CT和RT的值所确定的。锯齿波一方面为PWM电路提供频率基准,另一方面通过与偏差放大器的输出相比较而形成PWM信号。PWM是在供电直流电压为恒定值的条件下,通过改变平均电压调节电动机转速的有效手段。
MC33033中提供了一个其输入输出均可引出片外的完全补偿的偏差放大器,可用于实现速度闭环控制,其直流电压增益可达80dB,带宽为0.6MHz,且可达到满幅放大。在图11.12中MC33033配置为一个开环调速系统,该放大器作为调速电位器的跟随器。而在闭环系统中,该运算放大器则作为偏差放大器,对给定转速和实际转速之间的误差进行放大,控制PWM波形的脉宽,从而实现转速的闭环调节。
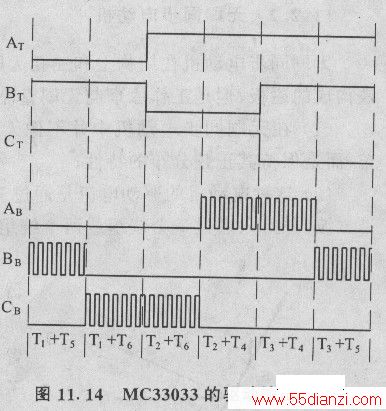
MC33033通过控制功率电路来驱动电动机,上桥驱动级是可吸收50mA电流,耐压30V的3个集电极开路晶体管,分别通过引脚AT、BT和CT输出,很容易实现与高压勃率电路的接口。3个推挽式下桥驱动输出的引脚是AB、BB和CB,特别适合于驱动N沟道MOSFET或NPN型双极晶体管,其输出和吸收电流可达lOOmA。上述6个引脚与表11.1相对应的输出波形如图11.14所示,在图的下方注明了当时导通的开关管。图中还可以看到PWM信号仅出现在下桥的驱动信号中。
本文关键字:直流电 电工电器基础,电子学习 - 基础知识 - 电工电器基础
上一篇:单相电动机的接线






