本文将讨论如何根据实际应用需求来组装、测试和使用低成本四通道步进电机驱动器。其中包括用于直接与PC机相连接的RS-232接口,用于表述传送给控制器的命令的客户端高级控制语言,以及驱动步进电机的驱动器电路。此外,还根据用户特殊要求对PC通讯软件进行一定程度的说明。此软件与微软的32位Windows开发平台兼容,采用BorlandDelphi来开发。
RS232串行接口
RS232串行接口标准制定于40多年前,是目前个人计算机上最受人欢迎的低带宽的串行通讯标准。事实上所有的计算机在出厂时都至少带有一个RS232口,很多微控制器也都装有RS232接口或很容易扩展出带RS232口的电路,所以RS232口经常被选为应用项目的连接装置。
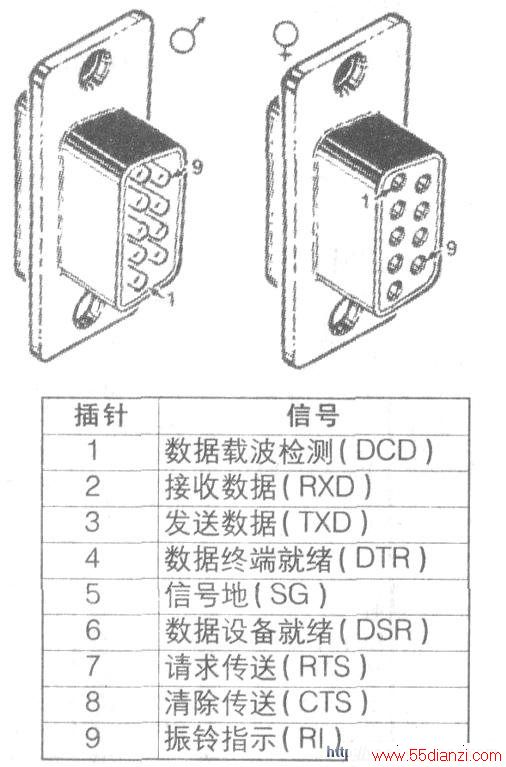
RS232串行接口有9根连接线.PC机上的一般配置采用9针小型D型连接器,称为COM1或COM2。实践中常常仅使用其中3根连线(插针2、3和5)就可以实现半双工通讯。此接口的完整的外观和连线见下图。但要注意:RS232接口不采用标准的TTL电平,而使用+3V—+25V电平来表示逻辑‘0’;-3V~-25V电平来表示逻辑‘1’。这种安排使得双方可以在一定距离内进行直接的通讯。但在电路内部需要增加实现RS232电平与TTL电平转换的附加电路。
在计算机一侧,与驱动器通讯的方式类似于通过接口对磁盘的数据文件进行存取。每个端口有独立的地址,存取前先要打开,传输所需数据后再关闭。不同点是在进行操作之前需要设置端口的属性(配置)。例如数据的传输率及数据超时处理方式等。
硬件结构
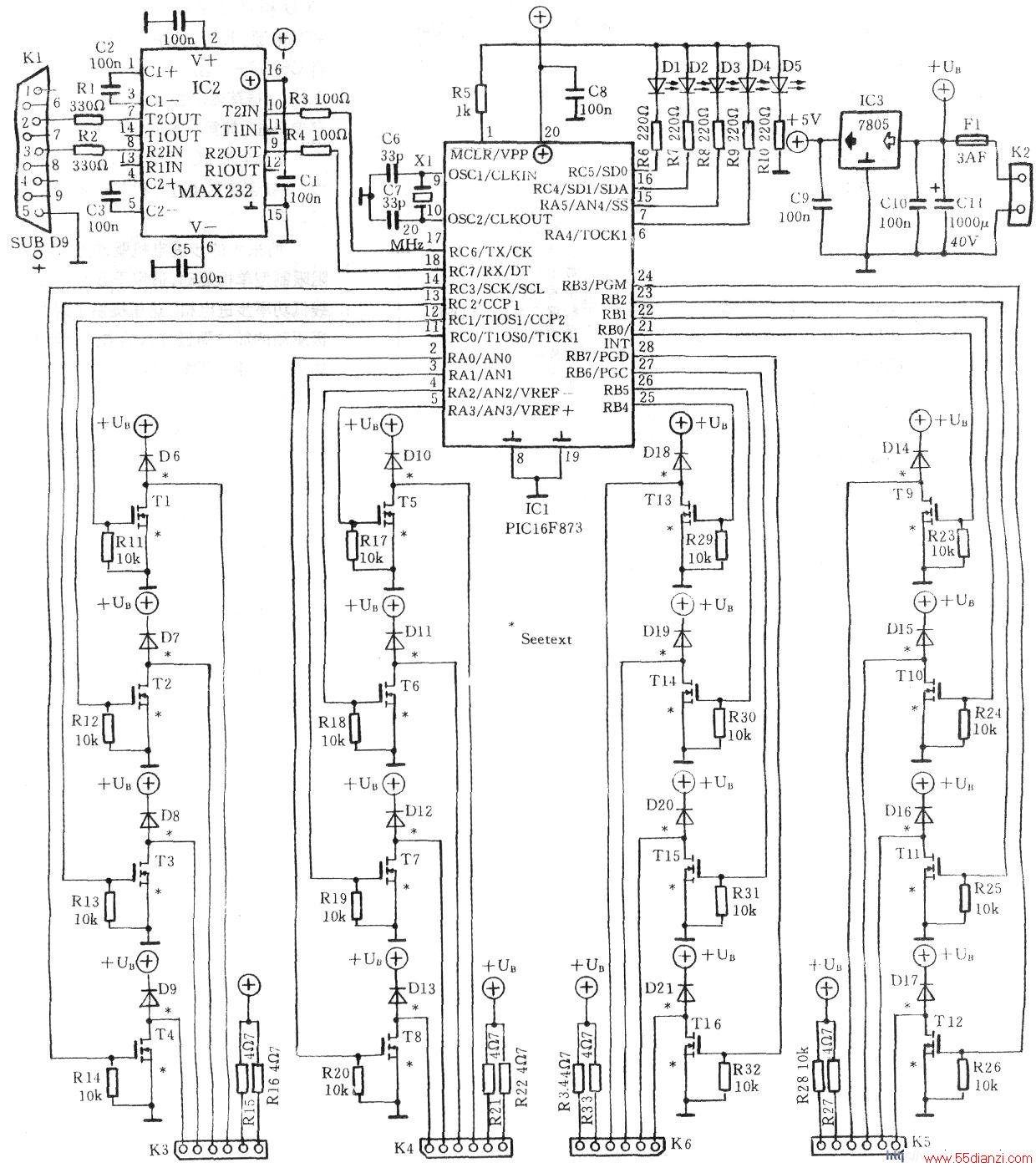
下图给出了步进电机驱动器和接口的电路图,图相当清晰。从RS232输入端开始,发送(TX)、接收(RX)线接在一个电平转换器芯片(IC2)上。如前所述:此芯片的功能是对RS232口的不对称电压进行转换。例如:从-9V/+9V之间变化,变为TTL电平范围(+5V~-5V)。注意:这些操作是在电路内部通过在双端高电压(+/-9V)电源上加开关电容来实现的。
转换后的TTL电平信号接到UART(通用异步收/发器),一个可编程集成电路(ICl)的管脚上。RS232的I/O端必须通过串联电阻R1、R2连接,转换后的另一端通过R3、R4连接,目的是在电路出现错误时加以保护。
线性稳压器IC3用于为PIC、MCU和RS232接口芯片提供稳定的+5v电源。IC1内部的双稳态电路与电容C6、C7-起组成了UART所需要的20MHz振荡器。由于微控制器PIC不需要复位,其第一脚被R1上拉为高电平。其余全部I/O管脚都被定义为输出口,并被连接到步进电机驱动器和LED指示器上。
所采用的步进电机驱动方式是电阻限制型单极驱动,适用于5、6和8引线低功率步进电机。这里提供了绕组单极驱动的简单而低成本的方法,但由于功率会消耗在平衡电阻上,这种方法效率较低。
相驱动电路采用由微控制器输出端直接驱动的金属氧化物场效应管(MOSFET)来为步进电机供电。电路可以使用各种逻辑级的场效应管(参见插图)。还需要用快恢复型二极管来提供存储在绕组中的能量的返回路径,并防止场效应管由于反电动势放电所造成的击穿危险。在可用的各种场效应管中选择时,请参考插图中给出的参数。平衡电阻用于限制通过某相绕组中的电流,但必然会耗费功率。电阻的值需要根据所用的电机专门进行计算。所以取得厂家关于步进电机的数据,包括:绕组阻抗、额定电流和额定电压等数据是必须的。如果无法取得数据,仅仅依靠万用表测量电阻值是不适宜的。
因为这种方式不能得到电机在实际功率水平下的数据参数。
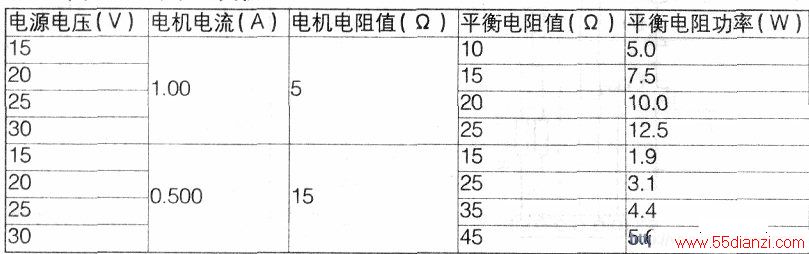
下表给出了一种平衡电阻的选择实例,以及两种步进电机在不同的电压下的额定参数。这些值可以用如下方法计算:
R平衡电阻=V电源/(I电机-R电机)P平衡电阻=0. 5(II电机xR平衡电阻)注意几点:由于电机在全步进方式运行,绕组仅半时供电。因此,选用的平衡电阻的额定功率可以是正常消耗功率的一半。电源电压可以选择在10~30V之间。电源电压越高,电机的负载能力越强。一般电源电压应略高于额定电压,不要忘记在平衡电阻上会有一个电压降。而且请记住:能被此PCB电路驱动的(每一绕组)的最大额定电流不能超过1A。
电路结构
此电路的所有元件都装配在一块PCB板上。布线方式和元件安装位置见下图。两个集成电路(IC1、IC2)配有双列直插式插座,而IC3直接焊接在PCB板上。焊接时,最好先安装高度较低的元件,如:跳线、电阻、IC插座、陶瓷电容等,主要是为安装方便。焊接时要特别注意各种半导体管和电解电容引脚的极性。还要注意平衡电阻安装时不能紧贴电路板的表面,因为运行时电阻会发热。最好使用陶瓷支架,使电阻在电路板上面保持一定距离。
如果不需要全部4个通道,板上可以仅放置步进电机驱动器4个通道中的两个通道。
焊接完成后,可将PIC微控制器和MAX232集成电路插入插座。然后可以用所买到的编号为020127-11的磁盘上专为此项目用的固件为你的PIC编程,此固件也可以从wwwELEKTOR-ELECTRONICS.CO.UK网站上免费下载。对于能力更强,希望定制PIC固件或增加更多功能的读者,本文中提供了固件源代码及其功能注释。
这对于修改固件及进行项目测试会有相当帮助。

微控制器软件
PIC微控制器的功能是接受PC机通过RS232口发来的命令,并且执行。负责产生和提交控制步进电机的步进脉冲序列。还能产生与指定电机相适应的最佳加速和减速步长周期。这就是为什么项目中采用一个PIC,而不直接用PC机来直接控制步进电机的原因。
虽然过去在以DOS为基础的计算机程序中,这种实时直接控制方式是可行的。但在当前已不适宜。因为最新的32位Windows操作系统实际上是多任务多线程的,处理器将时间分片利用,这就妨碍了定时的准确和稳定。
本项目固件采用CCS公司提供的供第三方使用的C语言编译器来编程,它与MICROChipMPLAB环境完全兼容。对于此编译器的更详细的说明和完整的话言资料,可以在CCS的网站上在线获得。代码分为3个文件:
MAIN,C:PROTOCOL,H和PORTS.H。
主程序在main.c中;管脚配置定义(各种名字)在ports.h中;而客户通讯协议在protocol.h中定义。固件的源代码可网站下载。
此项目中的通讯协议十分简单。
每个命令传送一个字节,如果命令还需要参数,就接着顺序发送参数。例如:为了通知PIC要使步进电机沿原方向运行1000步,需要3个字节:第一个字节为运行命令,其他两个字节指定运行步数(范围在0—65535之间)。根据第一个字节决定所传送命令的总长度。执行命令后,微控制器以一个应答字节通知PC机的软件。如果需要,可以接受更多的命令。
主程序模块功能是:首先初始化和复位所有的I/O端口。包括设置UART的传输率为38400bit/s。然后,程序进入一个空循环,等待在UART上接到一个命令字节。当接到命令时,程序转入相应的命令处理程序段,可以在UART上接受进一步字节。有效的命令列在下面:
和减速过程。
MOVE_A_FW(A向前运行,20H):
命令后接两个附加字节(16位二进制整数),指定步进电机A朝前方运行的步数。
MOVE_A_RV(A向后运行,21H):
命令后接两个附加字节(16位二进制整数),指定步进电机A朝反方向运行的步数。
MOVE_B_FW(B向前运行,22H):
MOVE_B_RV(B向后运行.23H):
MOVE_C_FW(C向前运行,24H):
MOVE_C_RV(C向后运行,25H):
上一篇:实用空调控制电路制作






