0 引言
步进电机能够实现角度和位置控制的基础是参考零位;所有转角都是以该零位为参考进行的,因此步进电机在任何控制之前必须进行零位标定。
零位标定的方法很多,主要有:①直接归零法。
该方法在零位处安装一个停止挡块,然后令步进电机向零位方向驱动足够大的角度,当步进电机回到零位时,被挡块挡住,电机停止位置即零位。
这种归零方法简单,但是在电机被挡块挡住时,仍会驱动电机执行归零动作,因此不仅会对步进电机和传动机构造成伤害,还会产生剧烈的抖动和较大的噪声;②传感器法。该方法在零位处安装霍尔开关、光电二极管等位置传感器,当步进电机回到零位时,传感器给出检测信号,控制电路检测到该信号时,令电机停在零点位置。这种归零方法准确、可靠,但是增加了电路的复杂性,对安装有一定的要求;③采用带停转检测的专用电机驱动芯片。这种芯片在电机停转时,能够立刻检测到电机处于停转状态,从而确定零点位置。
但这种方法通用性差,对步进电机各绕组的电流相位有一定的要求,并且这种方法不能在微步驱动方式下使用。
本文提出一种步进电机恒速渐变转矩归零方法。该方法采用微步驱动方式以恒定的转速执行归零过程。通过控制绕组驱动电流,使其按一定的规律变化,就能让步进电机在以微步方式的归零过程中,转矩逐渐减小,从而保证归零过程平稳、安静,并且能有效地保护步进电机和传动机构。
1基本原理
1.1步进电机转矩与转速的关系
步进电机的转速取决于驱动脉冲的频率;而步进电机能达到的最大转速取决于绕组的特性(等效电感和等效电阻)、驱动方式及外电路的电阻。
通常外电路的电阻很小,可以忽略不计。图1(a)为步进电机一个绕组的等效电路。图(b)为绕组电流的上升过程与等效电感的关系。

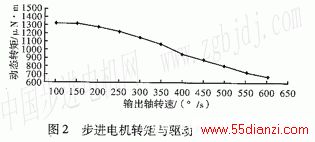
确定步进电机最大转速的最好方法是分析转矩一转速关系,因为大部分电机生产商都为其电机提供了转矩一转速曲线。步进电机的转矩主要与步进速率和绕阻中的驱动电流有关。通常步进电机的转矩随转速的增加而下降,一方面是由于驱动频率增加时,绕组的电流建立时间不足,造成驱动电流减小;另一方面是由于步进电机转动时,电机各相绕组的电感会产生反向电动势,且转速越高,反向电动势越大。在它的作用下,电机绕组的驱动电流降低,从而导致转矩下降。图2为某步进电机转矩一转速关系图。其中驱动方式为1/4微步,最大驱动电压为4.2 V。由图可知。
电机的转矩是随着驱动频率的增加而下降的。这一特性可被用于步进电机归零时的转矩控制。
1.2步进电机细分驱动技术
步进电机的整步驱动和半步驱动会引起较大的振动,尤其是在驱动频率较低时更是如此。步进电机的细分驱动技术,即微步驱动技术,它能够让电机转轴在两个相邻步进角之间平滑转动,并提高电机的步进精度。在多数应用中,细分驱动技术不仅能提高系统的性能,而且还能避免或减小步进电机容易出现的共振和噪声问题。
步进电机整步驱动时,其转矩随转轴位置的不同而变化。如一个理想的两相步进电机,其矩角特性如图3所示。其中两条虚线为两个绕组产生的转矩与转轴位置的关系曲线,实线为合成的转矩曲线。实际应用中,合成转矩只是近似地按正弦规律变化。

步进电机理想的转动方式是线性转动。这意味着步进角度应该一致,且不应该有明显的加速和减速过程,即应保证转矩恒定或平稳变化。在图3中,绕组1的转矩可以表示为

式中,T1为第1个绕组的转矩;Th为保持转矩;s为步距角,θ为转轴的转角。
绕组2的转矩可以表示为

步进电机的细分控制是由驱动器精确控制步进电机的相电流来实现的,其目的是使电机的输出转矩保持为一个常量。对于一个理想的电机,绕组产生的转矩与通过该绕组的驱动电流成正比,且合成转矩是各绕组转矩的线性叠加。因此,如果想让转轴旋转到口方向上,只要令绕组1和绕组2的驱动电流分别为:
此时,两绕组的合成电流为常数LmAx。控制步进电机绕组电流大小通常采用的是脉宽调制(PwM)方法。
2步进电机渐变转矩归零方法
2.1加速渐变转矩归零法
步进电机归零的目的是用来确定参考点,最简单的方法是直接归零法,但是直接归零法会对步进电机和传动机构造成损害。由分析可知,转 矩与转速有关,转速越大,转矩就越小。如果直接使用高转速归零,虽然对电机和传动机构伤害小,但是由于高转速转矩小,起动时容易失步,有时甚至无法完成归零过程。为了让电机在撞击停止挡块时,具有较小的转矩,常用的归零方法是加速归零法,如VID29系列步进电机推荐的归零曲线如图4所示。从图中曲线可以看出,归零时,输出轴从低速(约150。/s)开始加速,一直加速到较高转速(约500。/s),然后以恒定的高转速执行剩余的归零过程。
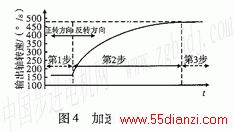
加速归零法虽然能减小对电机的伤害,但是由于归零速度很高,电机带动传动机构高速撞击挡块,仍然会对传动机构造成一定伤害。另外,由于挡块和传动机构具有一定的弹性,使得这种归零方法会产生零位误差。
2.2恒速渐变转矩归零法
为了克服高速归零的缺点,可以采用恒定低速归零的方法。然而在额定的驱动电流下,步进电机转速较低时,转矩较大,会对电机和传动机构造成伤害,因此需要对转矩进行适当地控制,使转矩在归零过程中逐渐减小。
我们知道,采用微步驱动技术可以使步进电机运行的更平滑、安静。电机归零可以采用微步驱动技术,但是如果给步进电机的两个绕组施加如式(3)和式(4)所示的电流,电机虽然能以微步方式归零,但是却不能使转矩逐渐减小。因为在任意转角θ上,其合成电流恒为Imax如果式3)和式(4)中的Imax取得过大,虽然能够保证电机归零可靠,但会对电机和传动机构造成损害;如果Imax取得过小,虽不会伤害电机,但容易造成电机无法启动,造成归零失败。
如果在归零过程中,动态地改变Imax使Imax随归零角度的增加而逐渐减小,则归零不仅能以微步方式进行,而且转矩在归零过程中逐渐减小。
这样时不仅运行平滑、安静,而且能有效地保护电机和传动机构。例如在归零过程中,转轴转角θ从O到θcom变化时,让驱动电流从Imax线性地衰减到IMIN。当θ大于θCOM时,仅需要维持电机匀速转动,较小的驱动电流即可满足要求,因此驱动电流维持IMIN,则电流幅值为:
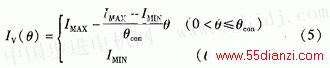
将IV(θ代替式(3)和式(4)中的IMAX就可以得到恒速渐变转矩归零时,两个绕组的驱动电流分别为:
本文关键字:步进电机 驱动电路及控制电路,单元电路 - 驱动电路及控制电路
上一篇:步进电机驱动电路研究






