普通电动玩具车均为单向驱动,在运动中遇到障碍物时不会自动返回,此时电机由于受阻停转或转速变慢而引起电流成倍增大,使电机严重发热,很浪费电池。本电路可以让玩具车在遇到‘障碍物时自动返回,因此使流过电机的电流不致太大,从而保护了电机。
本电路由检测电路、控制电路和驱动电路三部分组成,下面简述各部分电路的工作原理。
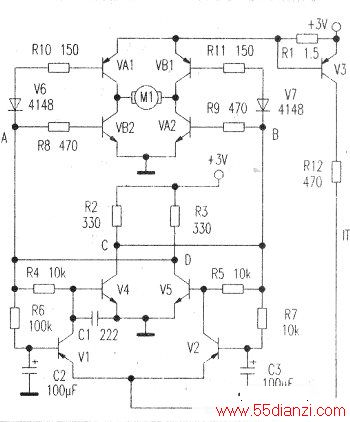
检测电路由R1、V3组成,用以检测电机运动状态,R1串联在电机电路中,其原理是当电机转动受阻时,通过R1的电流增大,当R1两端电压达到或超过0.6V时,三极管V3导通,集电极送出一个高电平信号,通过R12送到控制电路,作为控制转向的信号。改变R1的阻值可以改变电流检测的灵敏度,按图中参数设定的动作电流是400mA左右,该电流为电机工作电流的3~4倍。
驱动电路由VA1、VA2、VB1、VB2等组成,属于双端平衡方式驱动。其原理是改变A、B驱动端的电压极性就可改变电机的转动方向。当驱动电压为A负B正时,三极管VA1、VA2导通,电机正向转动,当驱动电压为A正B负时,三极管VB1、VB2导通,电机反向转动。两个稳定的相反极性的驱动电压由控制电路供给。
控制电路由三极管V4、V5,V1、V2等组成,其中V4与V5构成双稳态电路,可以从各自的集电极C和D输出两个稳定且极性相反的电压送往驱动电路。V1、V2构成闸门电路,它们轮流导通,把换向信号轮流送到三极管v5、V4的基极,作为双稳态电路的触发信号。该部分电路的工作过程是:假定某时v5导通,则V4截止,则c处于高电平,D处于低电平。由于V2的基极电阻R7接在C处,故V2截止,而V1的基极电阻R6接在D处,故V1可以导通(但此时并未导通,因为V1发射极尚没有高电平)。当换向信号产生时,高电平信号通过V1输入V4的基极,从而使V4导通,V5自动截止,此刻C处为低电平,D处为高电平,又将使V1截止,而V2可以导通。当又一个换向信号产生时,高电平信号通过V2输入V5的基极,又使V5导通,V4截止。整个电路的工作过程是:当电源接通,双稳态电路将建立一个稳态,由于V4基极加了延时电容Cl,将使V5优先导通,而V4截止(初态必须如此,否则将使电机一开始就反转)。C处输出高电平到B处,D处输出低电平到A处,即B正A负,电机正转;当电机运动受阻,使流过电阻R3的电流增大并达到一定值时,V3导通,送出高电平信号,经V1输入V4基极,使V4导通,而V5自动截止,电位变为C低D高,即B负A正,使电机反向运转。此后每产生一次换向信号,均可使电机改变一次方向,从而实现了自动换向。电容器C2、C3起延时作用,可防止V1、V2误导通。
VA1、VB1选用8550或9012等PNP三极管,VA2、VB2用8050或9013等NPN三极管,其余三极管NPN型可选用9014、1815等,PNP型可选用9015、1015等。图中电阻阻值是按3V电源计算的,低至2.2V可正常工作。当电源电压变化较大时,需适当调整R8、R9和Rl0、Rll的阻值。
本文关键字:玩具 驱动电路及控制电路,单元电路 - 驱动电路及控制电路
上一篇:28V伺服功率放大器电路






