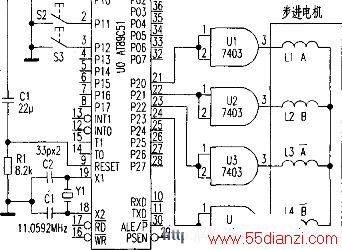
步进电机是由电脉冲信号转换成相应的角位移进行控制的,其角位移量和转速分别与电脉冲数和电脉冲频率成正比,在制作机器人控制系统中被作为传动核心。本文介绍利用AT89C51单片机控制3.5英寸旧软盘驱动器的小步进电机的方法,其硬件电路如附图所示。按下S1正转,按下S2逆转,按下S3停止。
3.5英寸软盘驱动器采用5V的双相单拍螺杆式步进电机,不同于一般的微型步进电机,它只有四根信号线,没有电源线和地线,四根线分别为红、白、黑、棕,此处分别定义为A(红)(P2.O)、B(白)(P2.1)、A(黑)(P2.2)、B(棕)(P2.3)。通过实验得到其正转和逆转的相序表。
本文关键字:步进电机 驱动电路及控制电路,单元电路 - 驱动电路及控制电路
上一篇:各种白色发光管驱动电路优缺点






