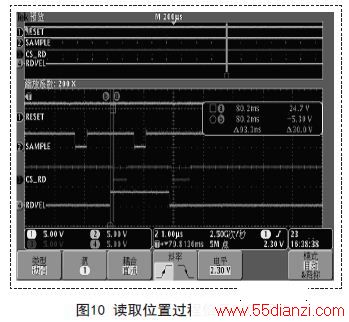
图10中SAMPLE有效时间为427ns;SAMPLE无效时间至读取角度/速度延时为750ns;R D V E L管脚选择读取角度/速度的延时为90ns;CS_RD有效时间为480ns,基本反映出从CS_RD下降沿至读取角度/速度的延时时间,CS_RD无效至下一次读取时间为200ns.
因此,测试所得AD2S1205的读取角度函数,与其驱动时序符合。测试所得AD2S1205的读取速度函数,与其驱动时序符合。通过仿真器验证,测试程序读取得到的角度值和速度值,也均符合预期。
6.结论
本文基于旋变及其解码芯片的原理和特点,提出了一种旋变位置解码系统的设计方案。试验结果表明,本方案的硬件和软件设计均满足电机位置解码要求,并且时序正确。
本文关键字:暂无联系方式科研成果,电子知识资料 - 科研成果






