在永磁同步电机(PMSM)直接转矩控制(DTC)系统中,速度传感器的安装带来了成本高、维护困难等问题,而磁链的准确观测对DTC系统性能具有重要意义。为实现系统的无速度传感器控制和准确的磁链观测,在基于空间矢量调制(SVM)的改进DTC策略基础上,采用扩展卡尔曼滤波器(EKF)在线观测出PMSM的定子磁链和转速,不仅实现了系统的无速度传感器控制,而且实现了对定子磁链的准确观测。实验结果证明了该方法的可行性和有效性,系统具有优良的静动态性能。
1 引言
PMSM具有功率密度大、低速输出转矩大、效率高等优良性能,现已广泛应用于伺服系统、舰船推进系统、电动机牵引系统、风力发电系统、航空航天等领域。DTC具有控制方式简单、转矩响应快、便于全数字化实现的优点,在交流传动中得到越来越多的应用;但DTC具有转矩和磁链脉动大、逆变器开关频率不固定等缺点,将SVM应用在PMSM DTC中,可有效减小转矩和磁链脉动,并使逆变器具有恒定的开关频率,从而得到更好的稳态控制性能。在DTC中,磁链和转速的估测精度直接决定着整个系统的性能。若在转子轴上安装机械式传感器得到电机的转速信息,不仅增加了系统成本,还限制了控制装置在恶劣环境下的应用。运用无速度传感器控制技术,可在线估计电机的磁链和转速,从而省去了机械传感器。故如何准确获得磁链和转速成为研究热点。EKF提供了一种对非线性系统状态进行精确估计的解决方案,可有效削弱随机系统噪声和测量噪声的影响,特别适合于电机等非线性控制系统。
这里在基于SVM的改进DTC策略基础上,采用4阶EKF观测出PMSM的定子磁链和转速,详细说明了EKF的设计,并设计了硬件实验平台,结果证明了所采用控制方法的可行性和有效性。
2 PMSM无速度传感器DTC系统
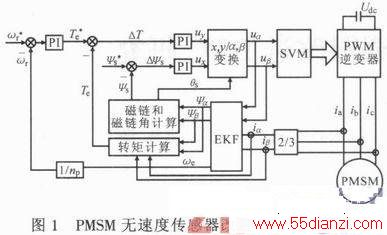
图1为PMSM无速度传感器改进DTC系统框图。图中,x,y/α,β模块实现电压分量从定子磁链x,y坐标系到两相静止α,β坐标系的变换:
![]()
式中:uα,uβ为定子电压在α,β轴分量:θs为定子磁链角。
定子磁链幅值ψs,θs及电磁转矩Te分别为:

3 EKF观测器设计
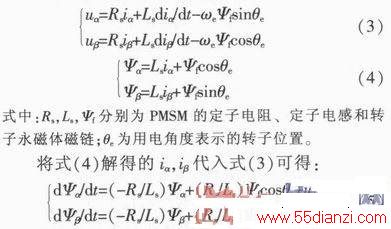
对于隐级式PMSM,其在两相静止α,β坐标系下的电压方程和磁链方程分别为:
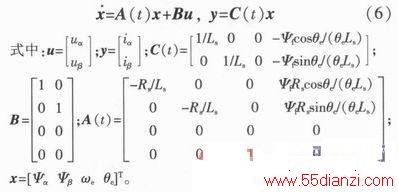
因为系统机械时间常数通常远大于电磁时间常数,所以设电机转速的导数为零,可建立状态方程和输出方程:
取采样周期为Ts,将式(6)用一阶欧拉法近似离散化,并加入系统动态噪声w(k-1)和测量噪声v(k)的影响,得到非线性离散化系统为:

 4 实验
4 实验
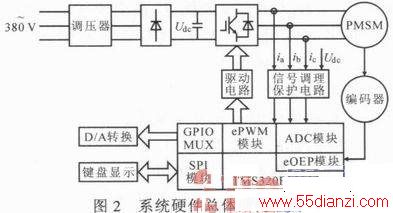
设计了基于DSP TMS320F28335的实验平台。系统整体硬件结构如图2所示,主要包括主电路、信号调理保护驱动电路和控制电路。主电路包括二极管不可控整流电路、三相全桥两电平逆变电路和功率模块驱动电路等;信号调理保护驱动电路主要包括三相电流采样电路、母线电压检测电路、过流与过压保护电路和电机码盘信号调理电路、驱动电路等;控制电路采用DSP TMS320F28335为核心,主要完成主控芯片最小系统、6路PWM信号整形、A/D转换、模拟量检测与控制执行保护及外扩D/A转换电路和键盘LED显示等工作。
系统控制对象为Minas A系列MDMA152A1G交流PMSM,电机参数:额定电压200 V,额定电流9.4 A,额定转矩7.15 N·m,额定转速2 000 r·min-1,np=4,定子电阻0.2 Ω,转子惯量1.23×10-3kg·m2,磁链给定0.24 Wb。EKF算法的参数和初值如下:P(0)=diag(0.001,0.001,1 000,0.001);Q(k-1)=diag(0.001,0.001,1 000,0.02);R(k)=diag(25,25);x(0)=zeros(4,1)。图3为电机在给定转速分别为1 500 r·min-1,800 r·min-1和80 r·min-1时,空载起动的实测转速ns与EKF观测的转速ng波形。其中ns是通过光电码盘由DSP在线测得。可见,在不同的给定转速下,电机在起动和稳态运行过程中,EKF观测器都能较好地估计出实际转速,电机运行平稳。电机在低速运行时,转速有一定波动,这是因为在低速时实际需检测的反馈信号值很小,电流谐波和A/D转换误差等干扰因素就显得较为突出,使得转速有一定波动,因此采用此方法电机在低速的运行性能不如中高速的运行性能。
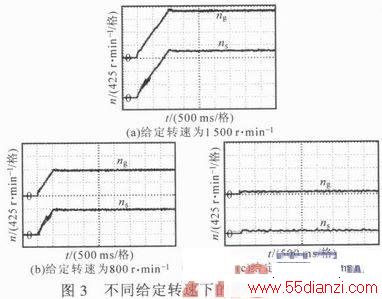
图4a为电机在给定转速为800 r·min-1时,空载稳定运行时EKF观测器所观测的ψα,ψβ波形;图4b为ng,定子磁链幅值ψs波形;由图4a,b可见,系统稳态运行时,ng,ψs与其给定值相等,且脉动很小,系统具有良好的稳态性能。图4c为电机在给定转速为800 r·min-1空载稳定运行情况下,将给定转速突增为1 500 r·min-1时的ng,ns波形,可见,当给定转速发生变化时,ng可较快地跟踪ns变化;图4d为给定转速为800 r·min-1稳定运行时,突减负载时所得到的ng,Te波形,可见,突减负载时转速几乎没有波动,同时也验证了所建立的控制系统具有良好的鲁棒性。

5 结论
针对永磁同步电机改进直接转矩控制系统,采用扩展卡尔曼滤波器实现对电机磁链和转速的准确估计,实验结果表明提出的无速度传感器直接转矩控制策略的可行性与正确性,并可得到以下结论:①采用该方法,电机能在较宽转速范围内起动和稳定工作;②在转速和负载变化过程中,扩展卡尔曼滤波器观测出的转速和磁链都能准确跟踪给定值,控制系统静、动态性能较好,鲁棒性较强。
本文关键字:同步电机 科研成果,电子知识资料 - 科研成果






