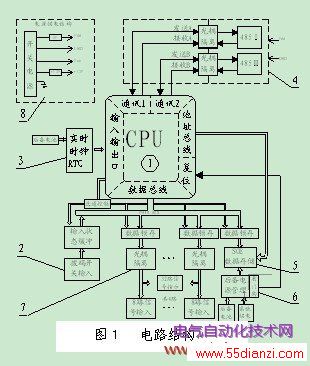
32路开关量信号采集单元(ARTU-K32)设计采用ATMEL公司的ATmega128,单芯片实现双路RS485通讯、数据处理、事件记录存取,显示状态控制等。ATmega128是ATMEL公司推出的一款8位RISC结构高速低功耗单片机,在16M时钟频率时系统性能可达16MIPS,内带128k的Flash、4k的EEPROM、4k系统SRAM;可扩展64k外部存储器;两路UART通讯口。同时该芯片拥有JTAG在线编程口,方便用户调试,降低了开发成本,53个可编程I/O口可以挂接足够多的外围设备。
1.2 拨码开关设定输入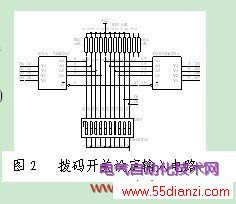
拨码开关提供用户一个简化的人机接口,用于设定RS485通讯中的地址、波特率、数据格式等设定功能,拨码开关(SW1)的10位数据口都接10k电阻上拉到Vcc,电路使用一个74HC244(IC5)数据缓冲器,把拨码开关的状态传送到8位数据总线,剩余两根数据线则直接接到CPU的I/O端口。(见图2)
1.3 实时时钟 实时时钟芯片RX-8025A(IC4)提供给系统SOE事件的时间记录点,该芯片拥有400kHz 串行IIC总线接口,其内置的32.768 kHz 石英振荡器,提供宽温、高稳定性的实时时间数据。 1.4 通讯方式 通讯方式采用双路RS485方式,调试及设定和上位机通讯部分在物理上分成两路,互不干扰,有效防止可能存在的误操作。(见图3)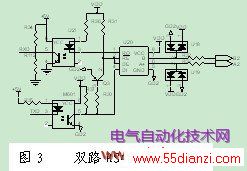
1.5 SOE事件记录存储
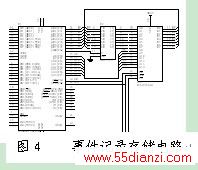
SOE事件记录存储器使用32k低功耗SRAM(IC3)IC61C256AH和后备电源形成一个断电不丢失的数据存储单元,使用数据锁存器74HC373(IC2)和CPU的PC端口组成15位数据地址对IC3进行数据存储操作。(见图4)
1.6 看门狗控制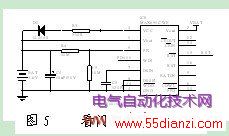
掉电自动保存部分使用MAX691CWE(IC8)作为电源管理,在系统有辅助供电的情况下保证IC3由主电源Vcc供电,当主电源掉电时则自动切换到后备电池供电方式。同时此芯片还兼有看门狗功能,在系统死机的极端情况下及时复位CPU,使系统快速恢复至受控状态。(见图5)
1.7 光电隔离的输入信号状态采集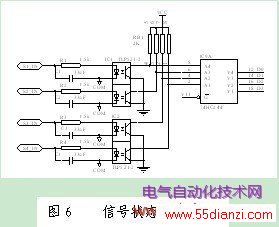
外部开关信号采集使用光耦(IC1,IC2只画出其中四路)作电器隔离,光耦输出端使用一个数据缓冲器74HC244(IC9)对光耦输出信号进行缓冲后传送到CPU的数据总线供CPU读取。(见图6)
1.8 电源部分 电源模块采用PI公司的开关电源芯片,输入范围为AC/DC 80-270V,电源共有3路输出,分别给CPU,12V电源输出、通讯等部分电路提供电源。 2 软件设计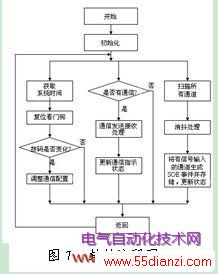 3 产品结构特点
ARTU-K32采用DIN35mm导轨安装。前端带通信指示和信号运行通道指示2组指示灯,通信有两路RS485接口,(使用ModBus—RTU协议)一路用于通用参数的设置及调试,另一路用于和上位机通讯。产品顶端设有拨码开关窗口,可通过拨码开关设置产品通讯地址和波特率。产品符合JB/T10388-2002《带总线通信功能的智能测控节点产品通用技术条件》、GB/T7261-2000《继电器及装置基本试验方法》和GB/T13729-2002《远动终端设备》标准。 4产品主要技术指标见表1
3 产品结构特点
ARTU-K32采用DIN35mm导轨安装。前端带通信指示和信号运行通道指示2组指示灯,通信有两路RS485接口,(使用ModBus—RTU协议)一路用于通用参数的设置及调试,另一路用于和上位机通讯。产品顶端设有拨码开关窗口,可通过拨码开关设置产品通讯地址和波特率。产品符合JB/T10388-2002《带总线通信功能的智能测控节点产品通用技术条件》、GB/T7261-2000《继电器及装置基本试验方法》和GB/T13729-2002《远动终端设备》标准。 4产品主要技术指标见表1
产品主要技术指标 表1
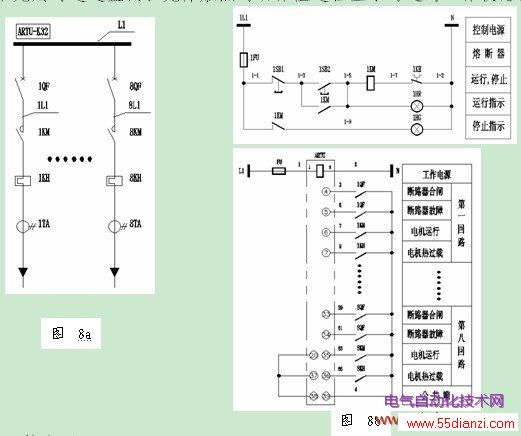
性能 指 标 输入回路/方式 32路有源湿接点或无源干接点 总线方式 二线制半双工RS485(ModBus—RTU)建议采用三芯屏蔽线 总线容量 ≤32 开关量事件分辨率 多接点相继变位的区分能力,任两个接点变位时间间隔大于1毫秒时,单元的区分能力(小于2ms)并在SOE中体现出来 遥信扫描速度 32个通道扫描一周需要1ms 遥信去抖时间 1~99ms可编程(32通道统一的时间) 事件顺序记录(SOE)容量 1600组 外壳防护等级 IP20 电源 DC24V或AC/DC200V 电源功耗 <5W 5应用案例 1台ARTU-K32可以监控8条马达回路或16路照明回路的工作状态。以监测马达回路为例,一次方案见图8(a),由配辅助、故障触点的NS断路器、LC1交流接触器、LR2热继电器和AKH-0.66P保护型互感器组成。每条马达回路监测4组节点,即断路器合闸、故障触点,电机运行(接触器)状态触点,电机热过载(热继电器)触点,1台ARTU-K32监测8条马达回路。见图8(b),通过现场启停按钮控制马达的运行与停车,现场红、绿指示灯同步显示马达的工作状态,遥信单元则可通过监测各元件触点的动作值远程显示马达的工作状态。
 6 结束语
ARTU-K32遥信单元于2007年12月在国家继电保护及自动化设备质量监督检验中心测试,符合相关要求。该产品已在某油田供水供电公司、苏州某税务大厦、内蒙古某煤矿等工程配电监控系统中得到应用,降低了投资成本,产生了较好的社会和经济效益。 参考文献:
[1]上海安科瑞电气有限公司.ARTU四遥单元安装使用说明书,2008.07版.
[2]任致远,周中.电力电测数字仪表原理与应用指南,中国电力出版社,2007. 了解更多请联系我们! 上海安科瑞电气股份有限公司 地址:上海市嘉定区育绿路253号 联系人:王春华 联系电话:021-39905610 传真号码:021-69158302 手机:15821733663 QQ:272904260 旺旺号:chunnuanhuakai28 邮箱:acrelwch@163.com
6 结束语
ARTU-K32遥信单元于2007年12月在国家继电保护及自动化设备质量监督检验中心测试,符合相关要求。该产品已在某油田供水供电公司、苏州某税务大厦、内蒙古某煤矿等工程配电监控系统中得到应用,降低了投资成本,产生了较好的社会和经济效益。 参考文献:
[1]上海安科瑞电气有限公司.ARTU四遥单元安装使用说明书,2008.07版.
[2]任致远,周中.电力电测数字仪表原理与应用指南,中国电力出版社,2007. 了解更多请联系我们! 上海安科瑞电气股份有限公司 地址:上海市嘉定区育绿路253号 联系人:王春华 联系电话:021-39905610 传真号码:021-69158302 手机:15821733663 QQ:272904260 旺旺号:chunnuanhuakai28 邮箱:acrelwch@163.com本文关键字:路遥 仪器仪表读写器,电子知识资料 - 仪器仪表读写器






