2.2 控制系统及控制策略
有源电力滤波器的控制系统及选用的控制算法是其滤波效果好坏的关键。有源电力滤波器的控制系统主要有模拟控制系统、数字控制系统以及数字模拟混合控制系统三类。近年来随着微电子技术的快速发展,各种数字处理芯片的性能大大提高,因此有源电力滤波器的控制系统逐步由模拟控制系统转化为模拟数字混合控制系统及纯数字控制系统。下面主要介绍有源电力滤波器的数字模拟混合控制系统与数字控制系统。
2.2.1 数字模拟混合控制系统
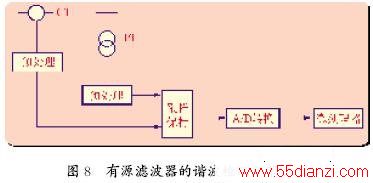
有源电力滤波器的控制系统一般由两个部分组成,即控制算法部分和触发脉冲产生部分。其中控制算法处理部分对谐波检测环节送来的数字信号进行处理,采用谐波检测算法,快速检测出需要的谐波与有源滤波器产生的谐波进行比较,根据其差值采用一定的控制方法产生触发脉冲信号送给触发脉冲发生部分。而触发脉冲发生部分根据该信号产生适当的驱动脉冲去驱动有源电力滤波器的变流器,使其产生的谐波电流或电压与所需的谐波电流或电压相同,从而达到谐波补偿的效果。所谓数字模拟混合控制就是通过数字电路检测并产生所需补偿的参考谐波信号,获得参考谐波信号后,通过模拟电路实现谐波跟踪(通常为比例积分PI 控制),PWM脉冲控制具有更快的速度和更高的分辨率。
2.2.1.1 滞环控制
此类控制器中滞环比较器由于产生的补偿电流参考信号能够快速准确地跟踪谐波电流变化,具有很好的实时性,所以在有源滤波器中得到了广泛的应用。滞环比较器的控制框图如图9所示,图10为滞环比较示意图。
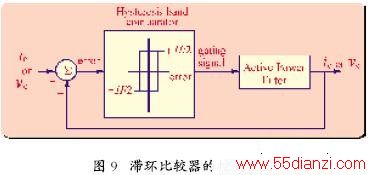

滞环比较控制采用滞环比较器,把检测出的补偿电流信号ie 与实际产生的补偿电流IC进行比较,两者的偏差作为滞环比较器的输入,通过滞环比较器产生控制主电路中开关通断的PWM 信号,从而控制补偿电流ic的变化。此类控制器中由于滞环比较器产生的补偿电流参考信号能够快速准确地跟踪谐波电流变化,具有很好的实时性,所以在有源滤波器中得到了广泛的应用。滞环比较控制的特点可归结为:硬件电路十分简单;属于实时控制方式,电流响应很快;不需要载波,输出电压中不含特定频率的谐波分量;属于闭环控制方式;若滞环的宽度固定,则电流跟随误差范围是固定的,但是电力半导体器件的开关频率是变化的。
在采用滞环比较器的瞬时值比较方式中,滞环的宽度通常是固定的,由此导致主电路中电力半导体器件的开关频率是变化的。尤其是当ic变化的范围较大时,一方面,在ic 值小的时候,固定的环宽可能使补偿电流的相对跟随误差过大;另一方面,在ic值大的时候,固定的环宽又可能使器件的开关频率过高,甚至可能超出器件允许的最高工作频率而导致器件损坏。另外,由于开关频率不固定,增加了高通滤波器及连接电抗器参数设计的难度。
针对采用滞环比较器的瞬时值比较方式在环宽固定时的这一缺点,一种解决的方法是将滞环比较器的宽度H 设计成可随ic 的大小而自动调节的;另一种方法是采用定时控制的瞬时值比较方式,该方式中,用一个由时钟定时控制的比较器代替滞环比较器。每个时钟周期对ic 变化量判断一次,使得PWM信号需要至少一个时钟周期才会变化一次,器件的开关频率最高不会超过时钟频率的一半。这样时钟信号的频率就限定了器件的最高工作频率,从而可以避免器件开关频率过高的情况发生。该方式的不足是,补偿电流的跟随误差不是固定的,从波形上看,就是毛刺忽大忽小。
2.2.1.2 三角波控制
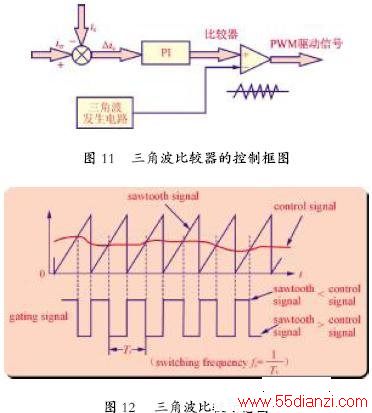
图11为三角波比较器的控制框图,图12 为三角波比较示意图。其中图12给出了在并联型有源电力滤波器中经常采用的一种数字模拟混合控制器的模拟部分。其中参考电流信号由微处理器通过D/A转换变成模拟信号送到模拟控制部分。有源电力滤波器的补偿电流与参考电流进行比较,通过比例积分环节后成为调整信号,与三角波发生电路产生的作为载波信号的三角波进行比较,获得驱动有源滤波器逆变器的PWM驱动脉冲。图12中,当控制信号大于锯齿波,则PWM脉冲信号为高电平;相反,则为低电平。与瞬时值比较方式相比,该方式具有的特点:硬件较为复杂;跟随误差较大;输出电压中所含谐波较少,但是含有与三角载波相同频率的谐波;器件的开关频率固定,且等于三角载波的频率;电流响应比瞬时值比较方式的慢。
由以上可知,瞬时值比较方式和三角波比较方式各有优缺点,不能孤立地说孰优孰劣,实际应用时可根据系统要求选择。日本电气学会的调查结果也表明了这一点,两种方法在实际应用中大体上各占一半,基本相当。
2.2.2 数字控制系统
随着微电子技术的快速发展,产生PWM脉冲的数字电路和具有可编程功能的器件快速发展,因而通过专门电路或通过可编程逻辑器件实现PWM 脉冲发生器已非常方便,而且在速度和分辨率方面也有着显著的提高,因此有源电力滤波器的控制系统已经逐步变成纯数字的控制系统。与其他的电力电子装置类似,根据有源滤波器控制算法的复杂性我们可以选择不同的数字控制系统来实现。通常的控制系统一般有基于单数字信号处理芯片的带有PWM信号的控制系统。由于DSP本身带有PWM脉冲产生部分,因此采用单片的DSP就可以实现有源电力滤波器的控制系统。当然,由于DSP芯片既要处理控制算法又要产生脉冲,因此只能实现简单的控制算法。如果要实现更加复杂与先进的算法,可采用多DSP芯片的控制系统或者DSP+FPGA(现场可编程逻辑阵列)的通用控制系统。采用双DSP 或DSP+FPGA结构,其中一个DSP处理器用来完成数据处理、控制与高层保护功能;另一个DSP处理器或FPGA用来产生高精度PWM脉冲。
2.3 主电路
有源电力滤波器的主电路型式多种多样,有很多种分类方法。具体分类方法见上所述。
2.4 保护电路
保护系统采用快速硬件保护(与功率单元直接连接)和高速DSP的软件保护相结合的方式,实现双重保护机制,使得系统安全,运行可靠。
2.5 耦合变压器
前面讲到的两种主电路结构都通过连接电抗器直接接入系统,但对于电压较高的情况,由于各种开关器件耐压水平的限制,变流器输出电压不可能太高,因此通常采用变压器接入方式。采用耦合变压器接入电力系统的好处有:
1)可以灵活地改变逆变器的输出电压和电流,从而充分利用开关器件的电压与电流容量;
2)可以提供绝缘隔离,变压器的电气与一、二次侧的绝缘隔离可以防止出现不必要的电气连接,可以提高有源电力滤波器的可靠性,还可以防止电力系统中的各种干扰直接进入到有源电力滤波器中。
虽然变压器带来了很大的好处,但是在有源电力滤波器中采用耦合变压器本身也存在一些缺点。
这主要是因为有源滤波器对耦合变压器存在较高的要求,因此在设计选择耦合变压器时要注意:
1)工作频带耦合变压器要有较宽的工作频带;
2)铁心材料的选择鉴于有源滤波器工作时的频率范围,耦合变压器的铁心材料一般选薄硅钢片或非晶合金磁性材料;
3)铁心结构选择由于有源滤波器输出的三相电压或电流是相互独立的,因此要求耦合变压器三相独立或三相之间相互影响小,所以有源滤波器的耦合变压器采用五铁心柱结构或采用三单相变压器,这样三相绕组之间的影响很小或三相完全独立。
3 有源滤波器设计步骤及参数选择
3.1 设计有源滤波器一般步骤
1)应该根据所需要补偿的负荷谐波次数及容量确定有源滤波器补偿电流谐波的最高次数及谐波的容量。
2)根据补偿效果及谐波就地补偿等原则确定有源滤波器的接入点。
3)根据接入点的电压等级及负荷的结构确定有源电力滤波器的电压等级及相应的主电路结构。对于380 V 系统,一般选择通过电抗器直接接入三相系统。而对于10 kV的系统,通常选择通过耦合变压器接入系统。
4)根据选择的电压等级及谐波电流的次数、容量以及所选择的主电路结构,参照开关器件的开关频率、电压等级、电流等级等选择合适的开关器件,确定有源滤波器直流侧合理的工作电压及连接电抗器的参数。
3.2 参数选择
3.2.1 电感选型
对于并联型有源电力滤波器,其主要功能是补偿电流ic(t)快速跟踪负荷电流中的谐波电流,从而使流入配电系统的谐波电流很小,避免对系统的污染。为了使ic (t)能够快速跟踪要补偿的电流,需要有源滤波器产生的ic(t)具有两个条件:首先,ic(t)的大小要满足补偿电流的要求,即逆变器补偿的电流必须大于等于补偿电流,也即有源滤波器的补偿容量满足负荷补偿的要求;其次,有源滤波器输出电流的变化率即DIC(t)/dt 要大于等于补偿电流的变化率,只有这样有源滤波器才能快速跟踪补偿电流的变化。
上一篇:无功补偿柜起火的原因及改进






